论文地址:https://www.cs.toronto.edu/~graves/icml_2006.pdf
概述
这是论文中第三节的翻译,加入了一些自己的理解。还有没看懂的地方,希望可以有人一起讨论
符号
符号的介绍在论文的第二章里面。
| 符号 |
含义 |
| S |
训练集 |
|
DX×Z |
数据服从的分布,
X是输入,
Z是标签 |
|
X∈(Rm)∗ |
输入是m维的向量,*表示有很多个向量 |
|
Z∈L∗ |
L∗是字母表,表示模型的输出在有限字母表中 |
S中每一个样本为
(x,z),
z=(z1,z2,...zu);x=(x1,x2,...xT);u≤T
训练一个模型:
h:X↦Z。
3. Connectionist Temporal Classification
3.1 From Network Outputs to Labellings
对于长度为T的输入
x,rnn有m个输入n个输出,权重向量
w,
Nw:(Rm)T↦(Rn)T。假设
y=Nw(X)是网络的输出序列。
| 符号 |
含义 |
|
ykt |
表示在时刻t得到label k的概率。 |
|
L′T |
长度为T的路径集合,路径上每一个元素在字母表
L′=L∪{blank} |
p(π∣x)=t=1∏Tyπtt,∀π∈L′T⋅⋅⋅⋅⋅⋅⋅⋅公式2
π是属于
L′T中的路径
定义一个多对一的函数
B:L′T↦L≤T,其中
L≤T是可能的Labeling的集合。这个函数的作用就是删除<blank>和重复的labels。例如
B(a−ab−)=B(−aa−−abb)=aab。然后,使用
B来定义条件概率,给定
l∈L≤T:
p(l∣x)=π∈B−1(l)∑p(π∣x)⋅⋅⋅⋅⋅⋅⋅公式3
3.2 Constructing the classifier
分类器的目标是对于输入
x输出可能性最大的labelling
h(x)=argl∈L≤Tmaxp(l∣x)
使用HMM的术语,将找labelling的任务成为decoding。不幸的是,这篇论文中理论系统没有找到一个通用、可解释的decoding算法,但是后面的两种方法在实践中取得了良好的效果。
第一种方法不是这篇论文的重点,重点是第二种方法。
第一种方法(best path decoding),是基于假设:最可能的路径对应最可能的labelling
h(x)≈B(π∗)where π∗=argπ∈Ntmaxp(π∣x)
这个公式里面第一次出现了
Nt,后面还会出现这个符号,但是文章并没有给出这个符号的具体意思。
第二种方法(prefix search decoding)
4. Training the Network
这一节介绍CTC网络使用梯度下降的优化目标。
目标函数是依据maximum likelihood的原则得到的。这个原则和标准神经网络目标函数的原则是一样的。
4.1 The CTC Forward-Backward Algorithm
需要一个高效的方法去计算单个labelling的条件概率
p(l∣x)。公式3中,发现这个问题很复杂:因为需要计算给定labelling的所有路径和。
幸运的是这个问题可以使用一种动态规划的方法解决,类似与HMM中的forward-backward algorithm。关键的一点是针对一个labelling,路径的和可以拆分成对这个labelling对应的前缀迭代求和。
这一段没有太看懂,大致意思是说路径的概率可以拆分成前向和后向两步,但是不知道怎么翻译
对于长度为
r的序列q,
q1:p和
qr−p:r分别表示前p个和后p个字符。对于labelling
l,定义前向变量
αt(s)是在时刻t,
l1:s的总概率。
αt(s)=defB(π1:t)=l1:sπ∈NT∑t′=1∏tyπt′t′⋅⋅⋅⋅⋅⋅⋅⋅公式5
将会看到
α(s)可以递归地从
αt−1(s)和
αt−1(s−1)得到
这一段中,q的下标长度的表述有问题,因为在后文会发现,
qr−p:r的范围是包含r-p的,所以不是后p个,而是后p+1个。
为了在输出路径中允许<blank>的存在,将原始labels的头尾插入<blank>,并且在每两个字符中间加入<blank>,构成一个改造过的label序列
l′,改造后
l′的长度是
2∣l∣+1。允许前缀以<blank>或者
l中的第一个字符(
l1)开头。
如下的迭代式:
α1(1)=yb1α1(2)=yl11α1(s)=0,∀s>2
递归:
αt(s)={αt(s)yls′t(αt(s)+αt−1(s−2))yls′tif ls′=<blank>orls−1′=ls′otherwise⋅⋅⋅⋅⋅公式6
这里
αt(s)=defαt−1(s)+αt−1(s−1)⋅⋅⋅⋅⋅公式7
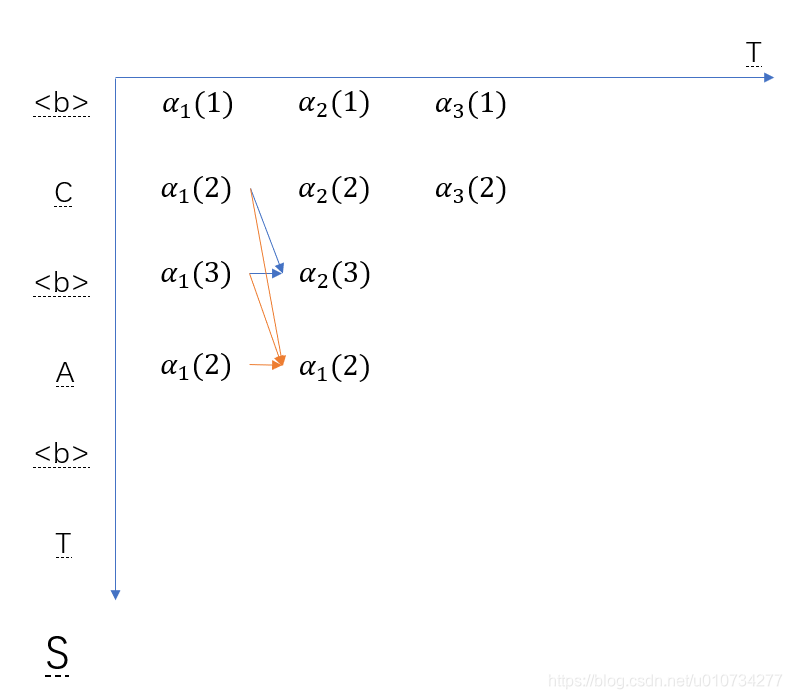
在递归公式中,第一种情况用蓝线表示,第二种情况用橙色的线表示。横向表示时间点,纵向表示labelling的第几个字符。
另外
αt(s)=0∀s<∣l′∣−2(T−t)−1,就是图中左上角的部分。
序列
l的概率是
l′中以<blank>和非<blank>结尾的概率和。
p(l∣x)=αt(∣l′∣)+αT(∣l′∣−1)⋅⋅⋅⋅⋅⋅公式8
类似的,可以定义后向变量
βt(s),是时刻t
ls:∣l∣的总概率。
βt(s)=defB(πt:T)=ls:∣l∣π∈NT∑yπt′t′⋅⋅⋅⋅⋅公式9
βT(∣l′∣)=y<blank>TβT(∣l′∣−1)=yl∣l∣TβT(s)=0,∀s<∣l′∣−1
βt(s)={βt(s)yls′t(βt(s)+βt+1(s+2))yls′tif ls=b or ls+2′=ls′otherwise
这里
βt(s)=defβt+1(s)+βt+1(s+1)
同样的,有
βt(s)=0∀s>2t and ∀s>∣l′∣
在实践的过程中,发现上面的递归过程会导致underflow。避免下一处的方法是对前向和后向变量进行rescale。
Ct=defs∑αt(s), α^t(s)=defCtαt(s)
Dt=defs∑βt(s), β^t(s)=defDtβt(s)
为了计算maximum likelihood error,需要得到目标labelling的概率的自然对数。使用rescale之后的变量可以得到一个很简单的形式:
ln(p(l∣x))=t=1∑Tln(Ct)
这个公式没有看懂,但是在后面好像也没用到这个公式
4.2 Maximum Likelihood Training
目标函数:
OML(S,Nw)=(x,z)∈S∑ln(p(z∣x))⋅⋅⋅⋅⋅⋅公式12
这个公式里面,M和L是啥没看懂。
S是训练集,
Nw相当于神经网络的参数,z是样本标签,x是样本输入
为了使用梯度下降训练,公式12需要进行微分。因为训练样本是互相独立的,所以可以分开考虑它们:
∂ykt∂OML({(x,z)},Nw)=−∂ykt∂ln(p(z∣x))⋅⋅⋅⋅⋅⋅公式13
最开始有一个疑问是公式的右边没有出现神经网络的参数,那优化的时候是怎么优化到参数的呢?后来想明白是因为
ykt是由神经网络得到的,所以在链式法则中会印象到参数
下面介绍4.1中介绍的算法如何运用到公式13中
关键点在于,对于一个labelling
l,在给定的s和t的位置前向变量和后向变量的乘积是经过(s,t)的所有路径的概率和。更精确的说,利用公式5和公式9,可以得到:
αt(s)βt(s)=πt=ls′π∈B−1(l)∑yls′tt=1∏Tyπtt
直接把5和9式写一起是这样的
[∑B(π1:t)=l1:sπ∈NT∏t′=1tyπt′t′][∑B(πt:T)=ls:∣l∣π∈NTyπt′t′],将括号展开之后就变成了前半段路径和后半段路径的排列组合。在前面对序列进行定义的地方说过,后半段和前半段实际上在s这个位置是会重复的所以在乘积前面会多出来一项
yls′t
这里解释了为什么要求正向和反向两个概率的乘积。因为在看这篇文章之前,想着直接正向概率到最后不就可以了吗,为什么要拆分成前向和后向两部分呢。这里就发现因为要对每一个位置求概率,所以需要进行拆分
利用公式2对它进行改写,得到:
yls′tαt(s)βt(s)=πt=ls′π∈B−1(l)∑p(π∣x)
同样,这里等式左边除的那一项是因为乘的过程中重复了
对比公式3,可以看出这是对总概率
p(l∣x)中,所有经过在时刻
t经过
ls′的割集。因此,对于任意的t,对所有的s加和就是总概率:
p(l∣x)=s=1∑∣l′∣yls′tαt(s)βt(s)⋅⋅⋅⋅公式14
为了求公式14对
ykt的偏导数,只需要考虑在时刻t经过label k的路径。由于在一个labelling
l中同一个label(或者blank)可能重复多次,所以定义了一个label k出现的位置集合,
lab(l,k)={s:ls′=k},这个集合可能是空的。
然后对公式14求偏导,得到:
∂ykt∂p(l∣x)=ykt21s∈lab(l,k)∑αt(s)βt(s)⋅⋅⋅⋅⋅⋅公式15
这个公式没有看太懂,分式对
ykt求偏导之后,为什么
α和β不需要求偏导呢?就是求和的地方不是应该是
∂ykt∂αt(s)βt(s)
还有这里定义的集合没有看懂
注意到
∂ykt∂ln(p(l∣x)))=p(l∣x)1∂ykt∂p(l∣x)
设定
l=z,在将8和15代入13,可以对目标函数进行微分
后面的就都没看懂了
最后,将梯度反向传播到SoftMax层,我们需要使用没有标准化的输出
ukt对应的目标函数的梯度。
如果使用4.1节中的方法进行rescaling,我们得到
∂ukt∂OML({(x,z)},Nm)=ykt−yktZt1s∈lab(z,k)∑α^t(s)β^t(s)
这里
Zt=defs=1∑∣l′∣yls′tα^t(s)β^t(s)
