最近老师布置了一个边缘检测的作业,我借此机会详细学习了一下canny算子,在此进行总结,并分别给出OpenCV源码和MATLAB源码,自己水平有限,若有错误或者更好的编程方法,请广大网友留言,一定虚心学习。好了废话少说,直接开始吧。
基本原理
- 须满足条件:抑制噪声;精确定位边缘。
- 从数学上表达了三个准则[信噪比准则(低错误率)、定位精度准则、单边缘响应准则],并寻找表达式的最佳解。
- 属于先平滑后求导的方法。
算法步骤
- 高斯平滑滤波(这个比较简单,后续介绍会省略)
- 计算图像梯度的幅值和方向
- 对幅值图像进行非极大值抑制
- 用双阈值算法检测和连接边缘
详细过程
1、高斯平滑滤波(略)
2、计算图像梯度的幅值和方向
可选用的模板:soble算子、Prewitt算子、一阶差分卷积模板等等;
在此选用Prewitt算子为例:
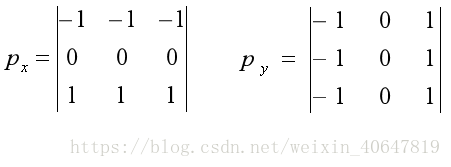
由此可算得x方向梯度幅值:

y
方向梯度幅值:

进一步可以得到图像梯度的幅值和方向:

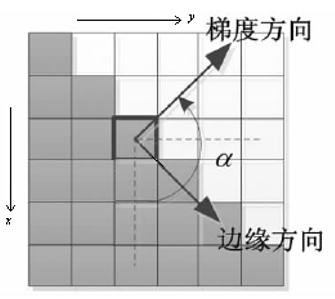
如下图表示了中心点的梯度向量、方位角以及边缘方向。(任一点的边缘与梯度向量正交)
 注:在opencv中由于反三角函数 cv::fastAtan2()得到的角度是0~360°,故划分为:水平(0°)、45°、垂直(90°)、135°,原理同上。
注:在opencv中由于反三角函数 cv::fastAtan2()得到的角度是0~360°,故划分为:水平(0°)、45°、垂直(90°)、135°,原理同上。
3、对幅值图像进行非极大值抑制
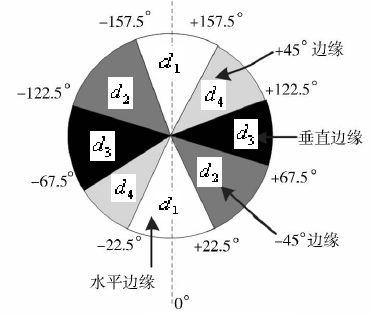
首先将角度划分成四个方向范围 :水平(0°)、−45°、垂直(90°)、+45°。如下图:
下面看上述角度划分对应于3*3邻域的4种可能组合,如下图:

扇形区标号d1~d4,对应3*3领域的4种可能的组合,1-x-5 , 7-x-3 , 2-x-6 , 8-x-4。
在每一点上,领域中心 x 与沿着其对应的梯度方向的两个像素相比,若中心像素为最大值,则保留,否则中心置0,这样可以抑制非极大值,保留局部梯度最大的点,以得到细化的边缘。
4、用双阈值算法检测和连接边缘
- 选取系数TH和TL,比率为2:1或3:1。(一般取TH=0.3或0.2,TL=0.1);
- 取出非极大值抑制后的图像中的最大梯度幅值,定义高低阈值。即:TH×Max,TL×Max (当然可以自己给定) ;
- 将小于低阈值的点抛弃,赋0;将大于高阈值的点立即标记(这些点就是边缘点),赋1;
- 将大于高阈值,小于低阈值的点使用8连通区域确定(即:只有与TH像素连接时才会被接受,成为边缘点,赋 1)。
算法实现
matlab代码
clc
clear all
img_in=imread('lenna.jpg');
img_in=rgb2gray(img_in);
figure,imshow(img_in);
title('原图');
[rows,cols]=size(img_in);
thresh=graythresh(img_in);
img_bw=im2bw(img_in,thresh);%二值图像
%%%%step1:高斯滤波
template=fspecial('gaussian',3,0.8);%生成一个3*3的高斯模板,标准差选0.8
img_filt=imfilter(img_bw,template);
%%%%step2:计算梯度(幅度和方向)
%Prewitt梯度模板
%也可选择一阶差分卷积模板:
%dx=[-1,-1;1,1] dy=[1,-1;1,-1]
%*********************
dx = [-1 -1 -1;0 0 0;1 1 1];%x方向的梯度模板
dy = [-1 0 1; -1 0 1;-1 0 1];%y方向的梯度模板
img_filt=double(img_filt);
grad_x=conv2(img_filt,dx,'same');%获取x方向的梯度图像.使用梯度模板进行二维卷积,结果与原图像大小相同
grad_y=conv2(img_filt,dy,'same');%获取y方向的梯度图像.使用梯度模板进行二维卷积,结果与原图像大小相同
grad=sqrt((grad_x.^2)+(grad_y.^2));%梯度幅值图像
figure,imshow(grad);
title('梯度幅值图');
grad_dir=atan2(grad_y,grad_x);%获取梯度方向弧度
grad_dir=grad_dir*180/pi;
%%%%step3:对梯度幅值进行非极大值抑制
%首先将角度划分成四个方向范围:水平(0°)、-45°、垂直(90°)、+45°
for i = 1:rows
for j = 1:cols
if((grad_dir(i,j)>=-22.5 && grad_dir(i,j)<=22.5) || (grad_dir(i,j)>=157.5 && grad_dir(i,j)<=180)...
||(grad_dir(i,j)<=-157.5 && grad_dir(i,j)>=-180) )
grad_dir(i,j) = 0;
elseif((grad_dir(i,j) >= 22.5) && (grad_dir(i,j) < 67.5) || (grad_dir(i,j) <= -112.5) && (grad_dir(i,j) > -157.5))
grad_dir(i,j) = -45;
elseif((grad_dir(i,j) >= 67.5) && (grad_dir(i,j) < 112.5) || (grad_dir(i,j) <= -67.5) && (grad_dir(i,j) >- 112.5))
grad_dir(i,j) = 90;
elseif((grad_dir(i,j) >= 112.5) && (grad_dir(i,j) < 157.5) || (grad_dir(i,j) <= -22.5) && (grad_dir(i,j) > -67.5))
grad_dir(i,j) = 45;
end
end
end
%讨论对3x3区域的四个基本边缘方向进行非极大值抑制.获取非极大值抑制图像
Nms = zeros(rows,cols);%定义一个非极大值抑制图像
for i = 2:rows-1
for j= 2:cols-1
if (grad_dir(i,j) == 90 && grad(i,j) == max([grad(i,j), grad(i,j+1), grad(i,j-1)]))
Nms(i,j) = grad(i,j);
elseif (grad_dir(i,j) == -45 && grad(i,j) == max([grad(i,j), grad(i+1,j-1), grad(i-1,j+1)]))
Nms(i,j) = grad(i,j);
elseif (grad_dir(i,j) == 0 && grad(i,j) == max([grad(i,j), grad(i+1,j), grad(i-1,j)]))
Nms(i,j) = grad(i,j);
elseif (grad_dir(i,j) == 45 && grad(i,j) == max([grad(i,j), grad(i+1,j+1), grad(i-1,j-1)]))
Nms(i,j) = grad(i,j);
end;
end;
end;
figure,imshow(Nms);
title('非极大值抑制图');
%%%%step4:双阈值检测和连接边缘
img_out=zeros(rows,cols);%定义一个双阈值图像
YH_L=0.1*max(max(Nms));%低阈值
YH_H=0.3*max(max(Nms));%高阈值
for i = 1:rows
for j = 1:cols
if(Nms(i,j)<YH_L)
img_out(i,j)=0;
elseif(Nms(i,j)>YH_H)
img_out(i,j)=1;
%对TL < Nms(i, j) < TH 使用8连通区域确定
elseif ( Nms(i+1,j) < YH_H || Nms(i-1,j) < YH_H || Nms(i,j+1) < YH_H || Nms(i,j-1) < YH_H ||...
Nms(i-1,j-1) < YH_H || Nms(i-1, j+1) < YH_H || Nms(i+1, j+1) < YH_H || Nms(i+1, j-1) < YH_H)
img_out(i,j) = 1;
end
end
end
bw=edge(img_bw,'canny');
figure,imshow(img_out);
title('本实验结果图');
figure,imshow(bw);
title('工具箱Canny算子效果图');
效果图



OpenCV代码(步骤和MATLAB步骤对应,略有改动)
改动点:在上述matlab是先将图像二值化后进行检测,选择prewitt,而在下面opencv是用灰度图直接检测,选用一阶差分卷积模板,可以看看效果的异同;
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include<opencv2/imgproc/imgproc.hpp>
#include<iostream>
#include"math.h"
using namespace std;
using namespace cv;
Mat Img_in , Img_gray , Img_out;
Mat scr;
int main()
{
Img_in=imread("lenna.jpg");
int rows=Img_in.rows;
int cols=Img_in.cols;//获取图像尺寸
cvtColor(Img_in,Img_gray,CV_BGR2GRAY);
imshow("【灰度图】",Img_gray);//转化为灰度图
//step1:高斯平滑
Mat img_filt;
GaussianBlur(Img_gray,Img_out,Size(3,3),0,0);
//adaptiveThreshold(img_filt , Img_out , 255 ,ADAPTIVE_THRESH_MEAN_C , THRESH_BINARY,min(rows,cols), 0);
//imshow("【二值图】",Img_out );
Img_out.convertTo(Img_out,CV_32FC1); //将图像转换为float或double型,否则算梯度会报错
/*step2:计算梯度(幅度和方向)
选择一阶差分卷积模板:
dx=[-1,-1;1,1] dy=[1,-1;1,-1]
*/
Mat gy=(Mat_<char>(2,2)<<1,-1,
1,-1);
//定义一阶差分卷积梯度模板
Mat gx=(Mat_<char>(2,2)<<-1,-1,
1,1); //定义一阶差分卷积梯度模板
Mat img_gx , img_gy , img_g ;//定义矩阵
Mat img_dir=Mat::zeros(rows , cols , CV_32FC1);//定义梯度方向矩阵,计算角度为float型
filter2D(Img_out, img_gx , Img_out.depth(), gx); //获取x方向的梯度图像.使用梯度模板进行二维卷积,结果与原图像大小相同
filter2D(Img_out, img_gy , Img_out.depth(), gy); //获取x方向的梯度图像.使用梯度模板进行二维卷积,结果与原图像大小相同
img_gx=img_gx.mul(img_gx);//点乘(每个像素值平方)
img_gy=img_gy.mul(img_gy);//点乘(每个像素值平方)
img_g=img_gx+img_gy;
sqrt(img_g, img_g); //梯度幅值图像
imshow("梯度图",img_g);
//求梯度方向图像
for(int i=0;i<rows; i++)
{
for(int j=0 ; j<cols; j++)
{
img_dir.at<float>(i,j)=fastAtan2(img_gy.at<float>(i,j) , img_gx.at<float>(i,j));//求角度
}
}
/* step3:对梯度幅值进行非极大值抑制
首先将角度划分成四个方向范围:水平(0°)、45°、垂直(90°)、135°
*/
Mat Nms=Mat::zeros(rows , cols , CV_32FC1);//定义一个非极大值抑制图像,float型
for(int i=0;i<rows; i++)
{
for(int j=0 ; j<cols; j++)
{
if(img_dir.at<float>(i,j) <=22.5 && img_dir.at<float>(i,j)>=0 || img_dir.at<float>(i,j) >=157.5 && img_dir.at<float>(i,j)<=202.5
|| img_dir.at<float>(i,j)>=337.5 && img_dir.at<float>(i,j)<=360)
img_dir.at<float>(i,j)=0;
else if(img_dir.at<float>(i,j)>22.5 && img_dir.at<float>(i,j)<=67.5 || img_dir.at<float>(i,j)>202.5 && img_dir.at<float>(i,j)<=247.5)
img_dir.at<float>(i,j)=45;
else if(img_dir.at<float>(i,j)>67.5 && img_dir.at<float>(i,j)<=112.5 || img_dir.at<float>(i,j)>247.5 && img_dir.at<float>(i,j)<=292.5)
img_dir.at<float>(i,j)=90;
else if(img_dir.at<float>(i,j)>112.5 && img_dir.at<float>(i,j)<157.5 || img_dir.at<float>(i,j)>292.5 && img_dir.at<float>(i,j)<337.5)
img_dir.at<float>(i,j)=135;
}
}
for(int i=1;i<rows-1; i++)
{
for(int j=1; j<cols-1; j++)
{
if ( img_dir.at<float>(i,j) == 90 && img_g.at<float>(i,j) == max(img_g.at<float>(i,j), max(img_g.at<float>(i,j+1), img_g.at<float>(i,j-1))))
Nms.at<float>(i,j) = img_g.at<float>(i,j);
else if ( img_dir.at<float>(i,j) == 45 && img_g.at<float>(i,j) == max(img_g.at<float>(i,j),max(img_g.at<float>(i-1,j+1), img_g.at<float>(i+1,j-1))))
Nms.at<float>(i,j) = img_g.at<float>(i,j);
else if( img_dir.at<float>(i,j) == 0 && img_g.at<float>(i,j) == max(img_g.at<float>(i,j),max( img_g.at<float>(i-1,j), img_g.at<float>(i+1,j))))
Nms.at<float>(i,j) = img_g.at<float>(i,j);
else if ( img_dir.at<float>(i,j) == 135 && img_g.at<float>(i,j) == max(img_g.at<float>(i,j),max(img_g.at<float>(i-1,j-1), img_g.at<float>(i+1,j+1))))
Nms.at<float>(i,j) = img_g.at<float>(i,j);
}
}
/*step4:双阈值检测和连接边缘
*/
Mat img_dst=Mat::zeros(rows , cols , CV_32FC1);//定义一个双阈值图像,float型
double TH,TL;
double maxVal=0;//必须为double类型,且必须赋初值,否则报错
Nms.convertTo(Nms,CV_64FC1); //为了计算,将非极大值抑制图像转为double型
minMaxLoc( Nms ,NULL, &maxVal,NULL,NULL); //求矩阵 Nms最大值
TH=0.3*maxVal ;//高阈值
TL=0.1*maxVal;//低阈值
for(int i=0;i<rows; i++)
{
for(int j=0 ; j<cols; j++)
{
if( Nms.at<double>(i,j)<TL)
img_dst.at<float>(i,j)=0;
else if( Nms.at<double>(i,j)>TH)
img_dst.at<float>(i,j)=1;
else if(Nms.at<double>(i-1,j-1)<TL || Nms.at<double>(i-1,j)<TL || Nms.at<double>(i-1,j+1)<TL ||
Nms.at<double>(i,j-1)<TL|| Nms.at<double>(i,j+1)<TL || Nms.at<double>(i+1,j-1)<TL ||
Nms.at<double>(i+1,j)<TL || Nms.at<double>(i+1,j+1)<TL)
img_dst.at<float>(i,j)=1;
}
}
imshow("非极大值抑制图",Nms);
imshow(" 边缘检测图", img_dst);
imwrite(" 边缘检测效果图.jpg",img_dst);//保存图像
waitKey(0);
return 0;
}
效果图

参考:https://blog.csdn.net/liuzhuomei0911/article/details/51345591
原创申明:转载请注明出处