canny边缘检测原理

去噪:边缘检测容易受到噪声的影响,在此之间,先去噪,通常采用高斯滤波器。opencv学习笔记11:图像滤波(均值,方框,高斯,中值)
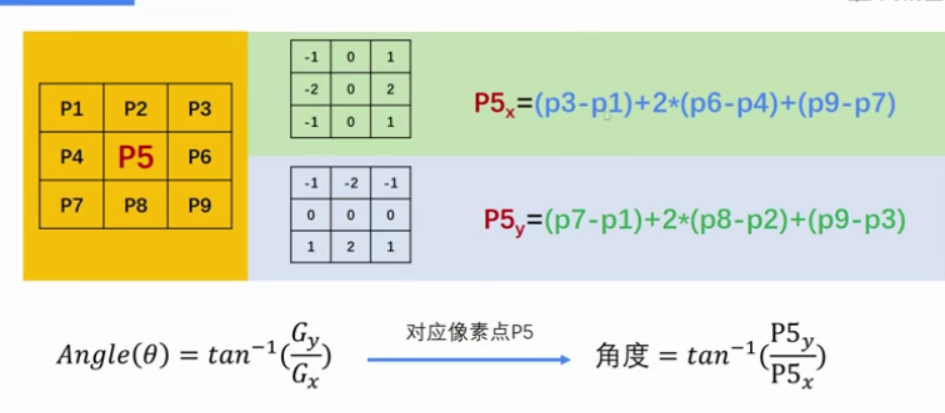
梯度:对去噪后的图像采用sobel算子计算梯度和方向。
这里的梯度不同于前面值只计算大小,这里还需计算方向。
梯度大小和方向公式见下
梯度的方向一般与边界垂直,分为四类:垂直,水平,和两个对角线。

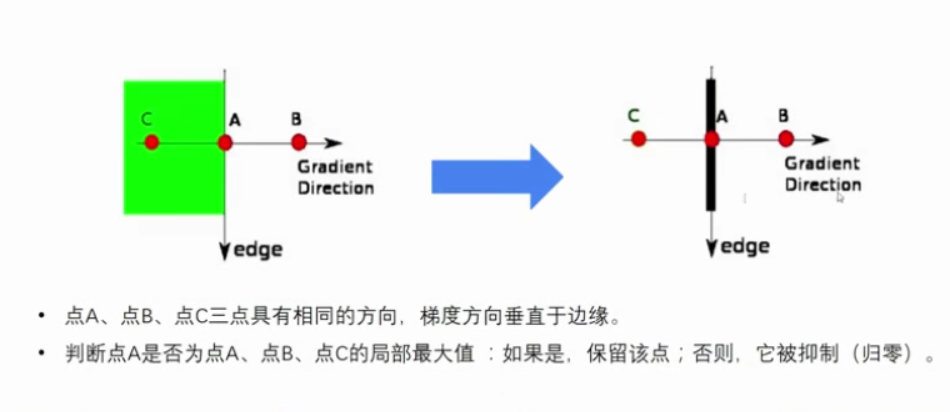
非极大值抑制:在获得梯度和方向,去除所有不是边界的点。实现方向:逐渐遍历像素点,判断当前像素点是否是周围像素点中具有相同方向梯度的最大值。是保留,不是则为0.

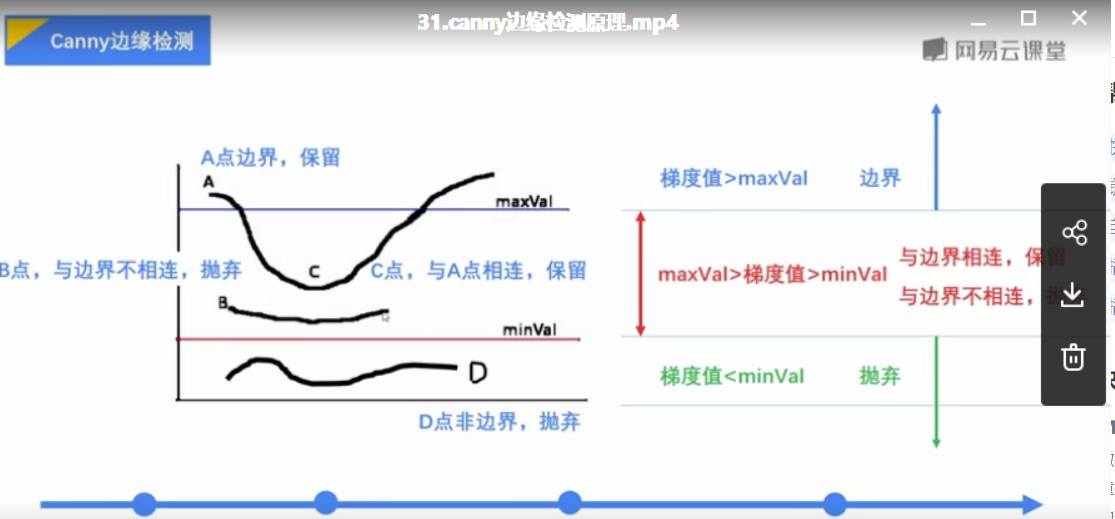
滞后阈值:有两个阈值,minVal,maxVal
处理方法见图:
大于maxVal保留,
小于maxVal但大于minVal且与边界相连保留。
其他舍弃
canny边缘检测函数使用
edges=cv2.Canny(image,threshold1,threshold2)
edges:处理结果
image:原始图像
threshold1:minVal
threshold2:maxVal
如果想让边界细节更多,则把threshold1和threshold2设小些。
python+OpenCV
import cv2
import numpy as np
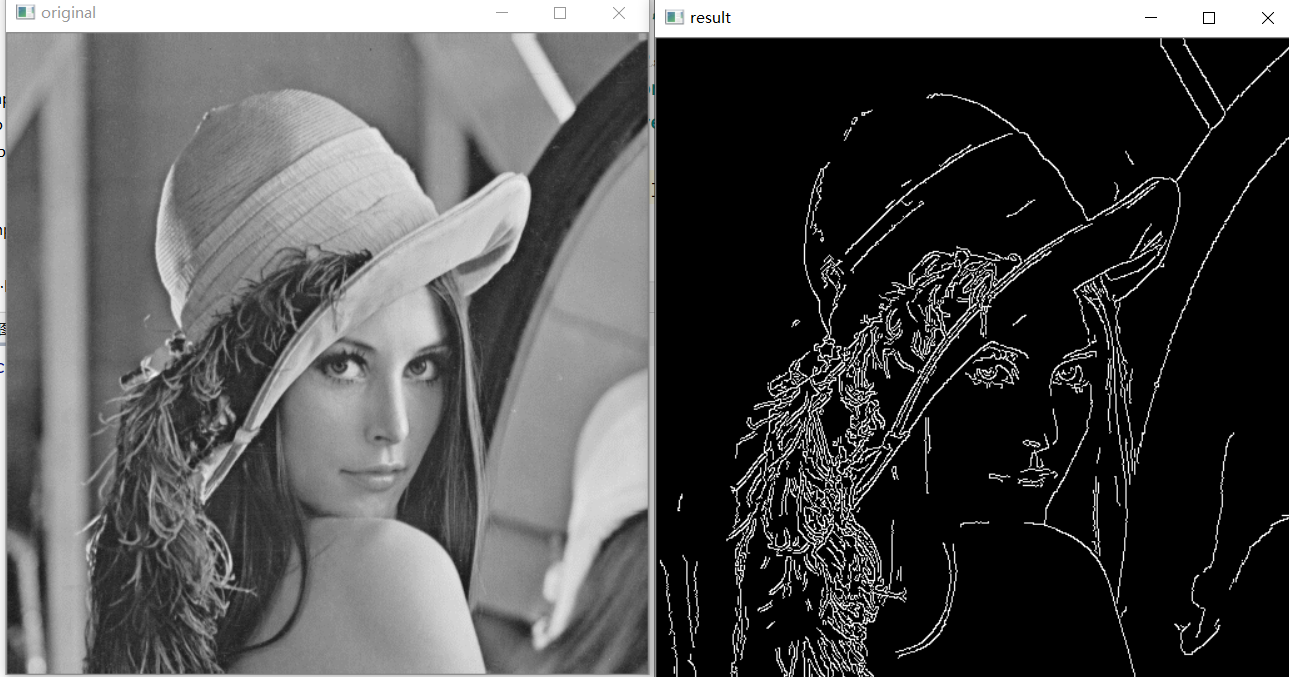
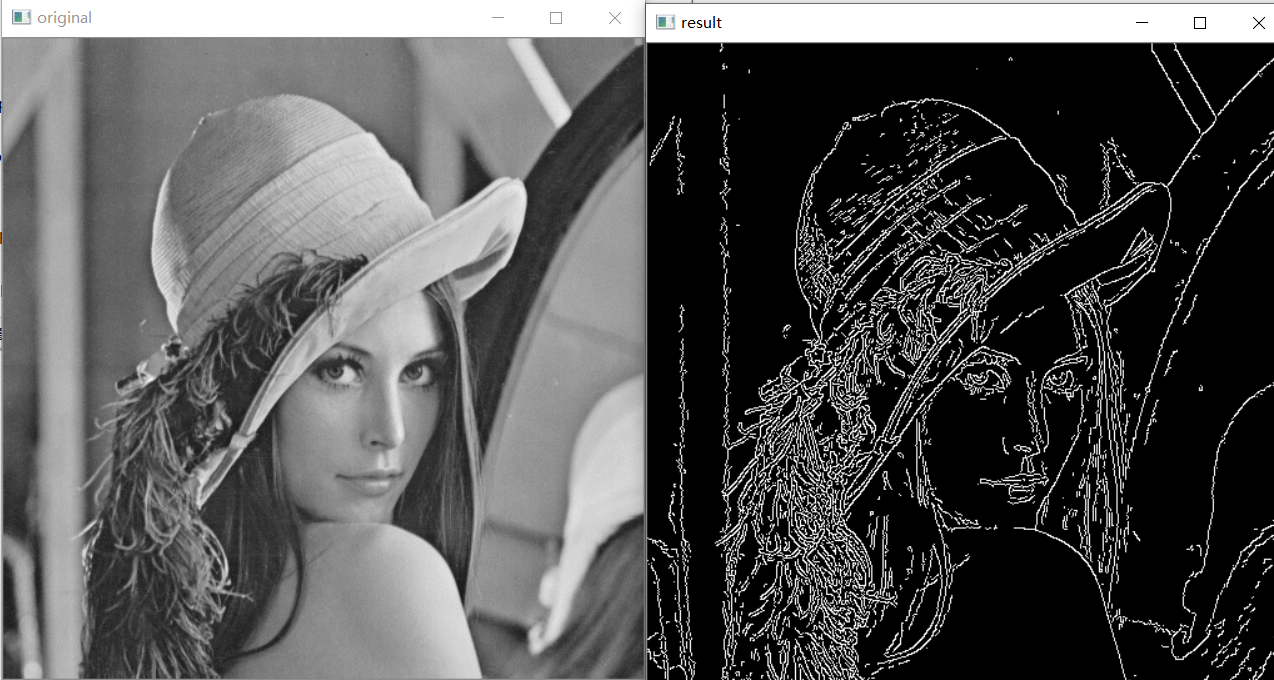
o=cv2.imread("lena.bmp",cv2.IMREAD_GRAYSCALE)#读取灰色图
r=cv2.Canny(o,100,200)
cv2.imshow("original",o)
cv2.imshow("result",r)
cv2.waitKey()
cv2.destroyAllWindows()
改变threshold
import cv2
import numpy as np
o=cv2.imread("lena.bmp",cv2.IMREAD_GRAYSCALE)
r=cv2.Canny(o,64,100)
cv2.imshow("original",o)
cv2.imshow("result",r)
cv2.waitKey()
cv2.destroyAllWindows()
更小的值有更多的细节
总目录链接:
python3+opencv学习笔记汇总目录(适合基础入门学习)
进阶版笔记:
opencv进阶学习笔记11:cannny边缘检测,直线检测,圆检测
电气专业的计算机小白,写博文不容易,如果你觉得本文对你有用,请点个赞支持下,谢谢。