一、基本原理
图像边缘是图像的重要信息,而Canny算子则是用于边缘检测的经典算法。在用Canny算子进行边缘检测之前必须有效地抑制噪声,该算法使用的是高斯平滑滤波。接下来计算图像中每一点的梯度向量,根据梯度向量可以得到梯度方向和梯度幅值。梯度方向在(-π,π]范围内,将梯度方向离散到4个方向,分别为上下方向、左右方向、主对角线方向、副对角线方向,根据离散后的梯度方向对梯度幅值进行非极大值抑制。例如,如果图像中点(x,y)的梯度方向沿上下方向,那么将点(x,y)的梯度幅值分别与点(x-1,y)和点(x+1,y)的梯度幅值进行比较;如果点(x,y)的梯度幅值大于另外两点,那么该点有可能是边缘点,将它的梯度幅值保留;如果点(x,y)的梯度幅值不大于另外两点,那么该点一定不是边缘点,将它的梯度幅值置零。接下来,用双阈值算法检测和连接边缘,高阈值用于检测边缘,低阈值用于连接边缘。在该算法中,取高阈值为梯度幅值最大值的0.3倍,取低阈值为梯度幅值最大值的0.1倍。如果某点的梯度幅值大于高阈值,那么该点一定是边缘点;如果某点的梯度幅值小于低阈值,那么该点一定不是边缘点;如果某点的梯度幅值介于低阈值和高阈值之间,那么该点有可能是边缘点,进一步,如果该点的8邻域的梯度幅值的最大值大于高阈值,那么将该点判定为边缘点。
二、实现步骤
(1)调用自定义函数myGauss生成高斯模板,高斯模板的大小和标准差均可以改变;
(2)将原图像f(x,y)与高斯模板做卷积,得到用高斯滤波器平滑后的图像g(x,y);
(3)用2×2一阶有限差分近似式来计算图像中各点的梯度向量:

以上两个公式对应的模板分别如下;

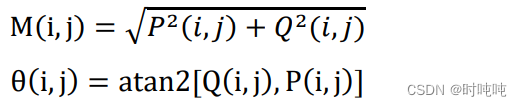
(4)利用梯度向量计算各点的梯度方向和梯度幅值:
(5)将梯度方向离散到4个方向,即上下方向、左右方向、主对角线方向和副对角线方向;

(6)根据离散后的梯度方向对梯度幅值进行非极大值抑制。例如,如果图像中点(x,y)的梯度方向沿上下方向,那么将点(x,y)的梯度幅值分别与点(x-1,y)和点(x+1,y)的梯度幅值进行比较;如果点(x,y)的梯度幅值大于另外两点,那么该点有可能是边缘点,将它的梯度幅值保留;如果点(x,y)的梯度幅值不大于另外两点,那么该点一定不是边缘点,将它的梯度幅值置零。

(7)用双阈值算法检测和连接边缘。高阈值和低阈值根据梯度幅值的最大值来确定,在该算法中,取:

如果某点的梯度幅值大于高阈值,那么该点一定是边缘点;如果某点的梯度幅值小于低阈值,那么该点一定不是边缘点;如果某点的梯度幅值介于低阈值和高阈值之间,那么该点有可能是边缘点,进一步,如果该点的8邻域的梯度幅值的最大值大于高阈值,那么将该点判定为边缘点。
三、效果演示
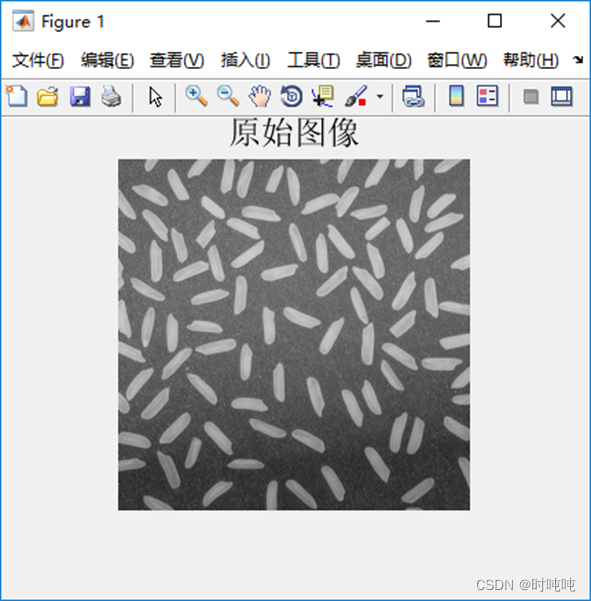
(1)原始图像;
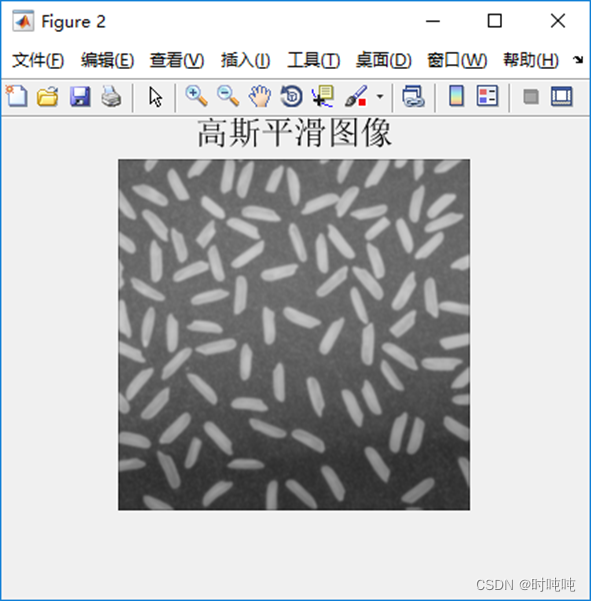
(2)高斯平滑后的图像;
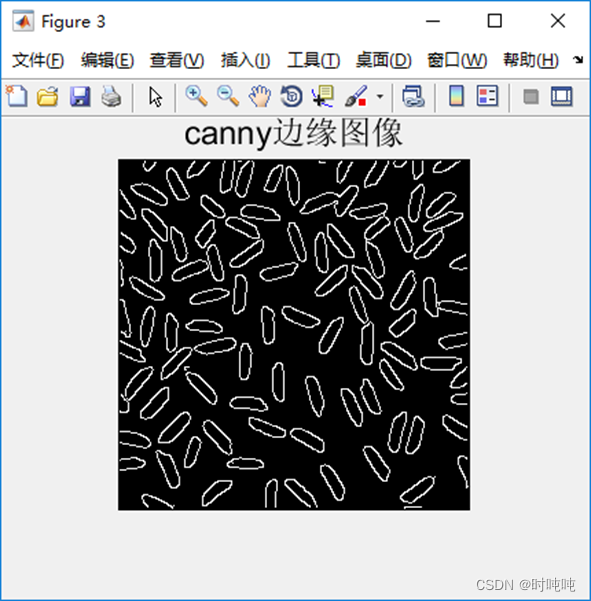
(3)Canny边缘检测的结果。
四、matlab实现代码
%% Canny边缘检测算子,高斯模板的大小和标准差均可以改变
clear,close all
clc
srcImg = imread('Canny算子用.png');
figure;
imshow(srcImg);
title('原始图像','fontsize',18);
srcImg = double(srcImg);
[rows,cols] = size(srcImg);
%% 用高斯滤波器平滑图像
guassMask = myGauss(1,1,0.8);
filteredImg = conv2(srcImg,guassMask,'same');
figure;
imshow(uint8(filteredImg));
title('高斯平滑图像','fontsize',18);
%% 计算梯度的幅值和方向
maskX = [-1 -1; 1 1];
maskY = [-1 1;-1 1];
gradX = conv2(filteredImg,maskX,'same');
gradY = conv2(filteredImg,maskY,'same');
M = sqrt(gradX.^2+gradY.^2);
theta = atan2(gradY,gradX);
%% 对梯度幅值进行非极大值抑制(向下为X+,向右为Y+)
for i = 1:rows
for j = 1:cols
if (theta(i,j)>=-pi/8 && theta(i,j)<pi/8)||(theta(i,j)>=pi*7/8 && theta(i,j)<=pi)||(theta(i,j)>-pi && theta(i,j)<-pi*7/8)
theta(i,j) = 0;
elseif (theta(i,j)>=pi/8 && theta(i,j)<pi*3/8)||(theta(i,j)>=-pi*7/8 && theta(i,j)<-pi*5/8)
theta(i,j) = 45;
elseif (theta(i,j)>=pi*3/8 && theta(i,j)<pi*5/8)||(theta(i,j)>=-pi*5/8 && theta(i,j)<-pi*3/8)
theta(i,j) = 90;
elseif (theta(i,j)>=pi*5/8 && theta(i,j)<pi*7/8)||(theta(i,j)>=-pi*3/8 && theta(i,j)<-pi/8)
theta(i,j) = 135;
end
end
end
NMS = zeros(rows,cols);
for i = 2:rows-1
for j = 2:cols-1
if theta(i,j)==0 && M(i,j)>M(i-1,j) && M(i,j)>M(i+1,j)% 比较中心像素点和上下两像素点的梯度幅值
NMS(i,j) = M(i,j);
elseif theta(i,j)==45 && M(i,j)>M(i-1,j-1) && M(i,j)>M(i+1,j+1)% 比较中心像素点和主对角线两像素点的梯度幅值
NMS(i,j) = M(i,j);
elseif theta(i,j)==90 && M(i,j)>M(i,j-1) && M(i,j)>M(i,j+1)% 比较中心像素点和左右两像素点的梯度幅值
NMS(i,j) = M(i,j);
elseif theta(i,j)==135 && M(i,j)>M(i-1,j+1) && M(i,j)>M(i+1,j-1)% 比较中心像素点和副对角线两像素点的梯度幅值
NMS(i,j) = M(i,j);
end
end
end
%% 用双阈值算法检测和连接边缘
dstImg = zeros(rows,cols);
thresholdLow = 0.1*max(NMS(:));
thresholdHigh = 0.3*max(NMS(:));
for i = 2:rows-1
for j = 2:cols-1
if NMS(i,j) > thresholdHigh % 若某像素点的梯度幅值大于高阈值,则该像素点为边缘点
dstImg(i,j) = 1;
elseif NMS(i,j)<thresholdLow % 若某像素点的梯度幅值小于低阈值,则该像素点非边缘点
dstImg(i,j) = 0;
elseif max(max(NMS(i-1:i+1,j-1:j+1)))>thresholdHigh % 若某像素点的梯度幅值介于高阈值和低阈值之间,则检测该像素点的8邻域是否存在边缘像素点,如果存在,则该像素点为边缘点
dstImg(i,j) = 1;
end
end
end
figure;
imshow(dstImg);
title('canny边缘图像','fontsize',18);
%% 函数定义:产生高斯模板
function gaussMask = myGauss(a,b,sigma)
m = 2*a+1;% m为高斯模板的行数
n = 2*b+1;% n为高斯模板的列数
gaussMask = zeros(m,n);
sigma2 = sigma*sigma;% sigma为标准差
for i = 1:m
for j = 1:n
gaussMask(i,j) = 1/(2*pi*sigma2)*exp(((i-a-1)*(i-a-1)+(j-b-1)*(j-b-1))/(-2*sigma2));% 计算高斯模板的系数
end
end
SUM = sum(gaussMask(:));
gaussMask = gaussMask/SUM;% 归一化
end