在欧式空间中使用的CNN卷积具有平移不变性,权值共享,局部连接,分层次表达的特点;但是图网络是一种非欧式结构的数据,网络是不规整的关系型数据,所以其不存在平移不变形(每个节点的周围邻居数不固定),导致图网络无法使用传统的CNN。不使用卷积核卷积的话,只能按照全连接网络的方式进行线性映射,这样又将失去权值共享,局部连接,分层次表达这些优势,需要大量的参数。在《Spectral Networks and Deep Locally Connected Networks on Graphs》 中,作者想办法把传统欧式空间的卷积迁移到图网络中去,作者提出了两个结构,把欧式空间的卷积迁移到了图网络的空间域和频域。
无向图:
G
=
(
Ω
,
W
)
G=(\Omega,W)
G = ( Ω , W )
Ω
\Omega
Ω
W
W
W
W
W
W
W
W
W
W
i
,
j
W_{i,j}
W i , j
在传统的欧式空间中(以图像为例),在卷积时需要设置一定大小的卷积核,如 kernel = (3,3),就是相当于中心像素点的邻域为周围的8个像素点。
W
W
W
N
δ
(
j
)
=
{
i
∈
Ω
:
W
i
,
j
>
δ
}
(1)
N_\delta(j)=\{i\in\Omega:W_{i,j}>\delta\}\tag{1}
N δ ( j ) = { i ∈ Ω : W i , j > δ } ( 1 )
N
δ
(
j
)
N_\delta(j)
N δ ( j )
j
j
j
δ
\delta
δ
j
j
j
δ
\delta
δ
j
j
j
2.2节中作者在介绍一个传统卷积的分层次表达的特点,这里就不再解释,直接进入2.3节。
N
k
=
{
N
k
,
i
;
i
=
1...
d
k
−
1
}
(2)
N_{k}=\{N_{k,i};i=1...d_{k-1}\}\tag{2}
N k = { N k , i ; i = 1 . . . d k − 1 } ( 2 )
在公式(2)中 ,k表示第k个尺度,类比传统卷积,意思就是第k层卷积层,
Ω
k
\Omega_{k}
Ω k
d
k
−
1
d_{k-1}
d k − 1
Ω
k
=
d
k
−
1
\Omega_{k} = d_{k-1}
Ω k = d k − 1
Ω
k
+
1
=
d
k
\Omega_{k+1}=d_{k}
Ω k + 1 = d k
N
k
,
i
N_{k,i}
N k , i
Ω
k
=
d
k
−
1
\Omega_{k} = d_{k-1}
Ω k = d k − 1
N
k
N_{k}
N k
x
k
+
1
,
j
=
L
k
h
(
∑
i
=
1
f
k
−
1
F
k
,
i
,
j
x
k
,
j
)
(
j
=
1...
f
k
)
(3)
x_{k+1,j}=L_{k}h(\sum_{i=1}^{f_{k-1}}{F_{k,i,j}x_{k,j}})(j=1...f_{k})\tag{3}
x k + 1 , j = L k h ( i = 1 ∑ f k − 1 F k , i , j x k , j ) ( j = 1 . . . f k ) ( 3 )
在公式(3)中,
f
k
−
1
f_{k-1}
f k − 1
x
k
=
(
x
k
,
i
;
i
=
1...
f
k
−
1
)
x_{k}=(x_{k,i};i=1...f_{k-1})
x k = ( x k , i ; i = 1 . . . f k − 1 )
x
k
x_{k}
x k
d
k
−
1
,
f
k
−
1
d_{k-1},f_{k-1}
d k − 1 , f k − 1
x
k
,
i
x_{k,i}
x k , i
d
k
−
1
d_{k-1}
d k − 1
d
k
−
1
d_{k-1}
d k − 1
F
k
,
i
,
j
F_{k,i,j}
F k , i , j
d
k
−
1
,
d
k
−
1
d_{k-1},d_{k-1}
d k − 1 , d k − 1
F
k
,
i
,
j
F_{k,i,j}
F k , i , j
N
k
N_{k}
N k
F
k
,
i
,
j
(
x
,
y
)
F_{k,i,j}(x,y)
F k , i , j ( x , y )
W
W
W
∑
i
=
1
f
k
−
1
F
k
,
i
,
j
x
k
,
j
\sum_{i=1}^{f_{k-1}}{F_{k,i,j}x_{k,j}}
∑ i = 1 f k − 1 F k , i , j x k , j
(
d
k
−
1
,
1
)
(d_{k-1},1)
( d k − 1 , 1 )
h
(
∗
)
h(*)
h ( ∗ )
L
k
(
∗
)
L_{k}(*)
L k ( ∗ )
(
d
k
−
1
,
1
)
(d_{k-1},1)
( d k − 1 , 1 )
(
d
k
,
1
)
(d_{k},1)
( d k , 1 )
x
k
+
1
,
j
.
s
h
a
p
e
=
(
d
k
,
1
)
x_{k+1,j}.shape = (d_{k},1)
x k + 1 , j . s h a p e = ( d k , 1 )
f
k
f_{k}
f k
x
k
+
1
=
(
x
k
+
1
,
i
;
i
=
1...
f
k
)
x_{k+1}=(x_{k+1,i};i=1...f_{k})
x k + 1 = ( x k + 1 , i ; i = 1 . . . f k )
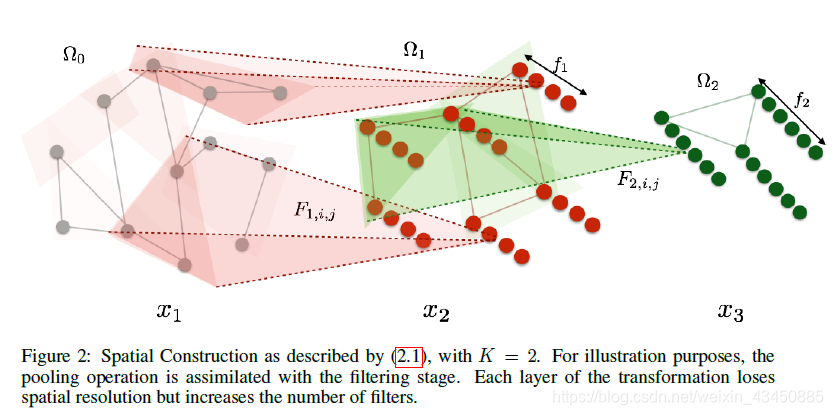
图上的空间域卷积如下图所示: k =1时:
n
u
m
(
Ω
0
)
=
12
,
x
1
.
s
h
a
p
e
=
(
12
,
f
0
)
,
f
1
=
4
,
F
1
,
i
,
j
.
s
h
a
p
e
=
(
12
,
12
)
,
1
≤
i
≤
f
0
,
1
≤
j
≤
f
1
,
d
1
=
6
num(\Omega_{0})=12,x_{1}.shape=(12,f_{0}),f_{1}=4,F_{1,i,j}.shape=(12,12),1 \leq i \leq f_{0},1 \leq j \leq f_{1},d_{1}=6
n u m ( Ω 0 ) = 1 2 , x 1 . s h a p e = ( 1 2 , f 0 ) , f 1 = 4 , F 1 , i , j . s h a p e = ( 1 2 , 1 2 ) , 1 ≤ i ≤ f 0 , 1 ≤ j ≤ f 1 , d 1 = 6 k =2时:
n
u
m
(
Ω
1
)
=
d
1
=
6
,
x
2
.
s
h
a
p
e
=
(
6
,
f
1
)
,
f
2
=
6
,
F
2
,
i
,
j
.
s
h
a
p
e
=
(
6
,
6
)
,
1
≤
i
≤
f
1
=
4
,
1
≤
j
≤
f
2
,
d
2
=
3
num(\Omega_{1})=d_{1}=6,x_{2}.shape=(6,f_{1}),f_{2}=6,F_{2,i,j}.shape=(6,6),1 \leq i \leq f_{1}=4,1 \leq j \leq f_{2},d_{2}=3
n u m ( Ω 1 ) = d 1 = 6 , x 2 . s h a p e = ( 6 , f 1 ) , f 2 = 6 , F 2 , i , j . s h a p e = ( 6 , 6 ) , 1 ≤ i ≤ f 1 = 4 , 1 ≤ j ≤ f 2 , d 2 = 3 网络输出:
x
3
.
s
h
a
p
e
=
(
d
2
,
f
2
)
=
(
3
,
6
)
x_{3}.shape=(d_{2},f_{2})=(3,6)
x 3 . s h a p e = ( d 2 , f 2 ) = ( 3 , 6 )
离散域的卷积公式:
(
f
∗
g
)
=
∑
τ
=
−
∞
∞
f
(
τ
)
g
(
n
−
τ
)
(f*g)=\sum_{\tau=-\infty}^{\infty}{f(\tau)g(n-\tau)}
( f ∗ g ) = ∑ τ = − ∞ ∞ f ( τ ) g ( n − τ )
X
(
k
)
=
F
(
x
(
n
)
)
=
∑
n
=
0
N
−
1
x
(
n
)
e
−
j
k
2
π
N
n
X(k)=F(x(n))=\sum_{n=0}^{N-1}{x(n)e^{-jk\frac{2\pi}{N}n}}
X ( k ) = F ( x ( n ) ) = ∑ n = 0 N − 1 x ( n ) e − j k N 2 π n
k
∈
[
0
,
N
−
1
]
k\in[0,N-1]
k ∈ [ 0 , N − 1 ]
x
(
n
)
x(n)
x ( n )
{
e
−
j
k
2
π
N
n
}
\{e^{-jk\frac{2\pi}{N}n}\}
{ e − j k N 2 π n }
x
(
n
)
x(n)
x ( n )
{
e
−
j
k
2
π
N
n
}
\{e^{-jk\frac{2\pi}{N}n}\}
{ e − j k N 2 π n }
X
(
k
)
X(k)
X ( k )
x
(
n
)
=
F
−
1
(
X
(
k
)
)
=
1
N
∑
k
=
0
N
−
1
X
(
k
)
e
j
k
2
π
N
n
x(n) = F^{-1}(X(k))=\frac{1}{N}\sum_{k=0}^{N-1}{X( k)e^{jk\frac{2\pi}{N}n}}
x ( n ) = F − 1 ( X ( k ) ) = N 1 ∑ k = 0 N − 1 X ( k ) e j k N 2 π n
n
∈
[
0
,
N
−
1
]
n\in[0,N-1]
n ∈ [ 0 , N − 1 ]
(
f
∗
g
)
=
F
−
1
[
F
[
f
]
⨀
F
[
g
]
]
(4)
(f*g)=F^{-1}[F[f]\bigodot F[g]]\tag{4}
( f ∗ g ) = F − 1 [ F [ f ] ⨀ F [ g ] ] ( 4 )
⨀
\bigodot
⨀
D
D
D
D
D
D
W
W
W
L
=
D
−
W
L=D-W
L = D − W
L
L
L
L
=
V
Λ
V
T
L=V\Lambda V^{T}
L = V Λ V T
V
=
(
v
1
,
.
.
.
,
v
i
,
.
.
.
v
n
)
,
v
i
V=(v_{1},...,v_{i},...v_{n}),v_{i}
V = ( v 1 , . . . , v i , . . . v n ) , v i
L
L
L
Λ
=
d
i
a
g
(
λ
1
.
.
.
λ
i
.
.
.
λ
n
)
\Lambda=diag(\lambda_{1}...\lambda_{i}...\lambda_{n})
Λ = d i a g ( λ 1 . . . λ i . . . λ n )
λ
i
\lambda_{i}
λ i
L
L
L
L
v
i
=
λ
i
v
i
(5)
Lv_{i}=\lambda_{i}v_{i}\tag{5}
L v i = λ i v i ( 5 )
而所有的基向量
{
e
−
j
k
2
π
N
n
}
\{e^{-jk\frac{2\pi}{N}n}\}
{ e − j k N 2 π n }
∇
2
f
=
∂
2
e
−
j
k
2
π
N
n
∂
n
2
=
−
(
k
2
π
N
)
2
e
−
j
k
2
π
N
n
=
−
w
2
f
(6)
\nabla^{2}f=\frac{\partial^{2} e^{-jk\frac{2\pi}{N}n}}{\partial n^{2}}=-(k\frac{2\pi}{N})^{2}e^{-jk\frac{2\pi}{N}n}=-w^{2}f\tag{6}
∇ 2 f = ∂ n 2 ∂ 2 e − j k N 2 π n = − ( k N 2 π ) 2 e − j k N 2 π n = − w 2 f ( 6 )
∇
2
\nabla^{2}
∇ 2
e
−
j
k
2
π
N
n
e^{-jk\frac{2\pi}{N}n}
e − j k N 2 π n
∇
2
\nabla^{2}
∇ 2
−
w
2
-w^{2}
− w 2
e
−
j
k
2
π
N
n
e^{-jk\frac{2\pi}{N}n}
e − j k N 2 π n
v
i
v_{i}
v i
−
w
2
-w^{2}
− w 2
λ
i
\lambda_{i}
λ i
f
f
f
f
^
\hat{f}
f ^
f
^
(
k
)
=
∑
n
=
0
N
−
1
f
(
n
)
e
−
j
k
2
π
N
n
=
∑
n
=
0
N
−
1
f
(
n
)
v
k
(
n
)
=
v
k
T
f
(7)
\hat{f}(k) =\sum_{n=0}^{N-1}{f(n)e^{-jk\frac{2\pi}{N}n}}=\sum_{n=0}^{N-1}{f(n)v_{k}(n)}= v_{k}^{T}f\tag{7}
f ^ ( k ) = n = 0 ∑ N − 1 f ( n ) e − j k N 2 π n = n = 0 ∑ N − 1 f ( n ) v k ( n ) = v k T f ( 7 )
由式(7)可知:
f
^
=
V
T
f
(8)
\hat{f}=V^{T}f\tag{8}
f ^ = V T f ( 8 )
将式(8)带入卷积公式得:
(
g
∗
f
)
=
V
[
V
T
g
⨀
V
T
f
]
(9)
(g*f)=V[V^{T}g\bigodot V^{T}f ]\tag{9}
( g ∗ f ) = V [ V T g ⨀ V T f ] ( 9 )
由于
V
T
g
=
(
v
1
T
g
,
.
.
.
,
v
n
T
g
)
T
V^{T}g=(v_{1}^{T}g,...,v_{n}^{T}g)^{T}
V T g = ( v 1 T g , . . . , v n T g ) T
V
T
g
⨀
V
T
f
=
d
i
a
g
(
v
1
T
g
,
.
.
.
,
v
n
T
g
)
V
T
f
V^{T}g\bigodot V^{T}f=diag(v_{1}^{T}g,...,v_{n}^{T}g)V^{T}f
V T g ⨀ V T f = d i a g ( v 1 T g , . . . , v n T g ) V T f
g
θ
=
d
i
a
g
(
v
1
T
g
,
.
.
.
,
v
n
T
g
)
g_{\theta}=diag(v_{1}^{T}g,...,v_{n}^{T}g)
g θ = d i a g ( v 1 T g , . . . , v n T g )
(
g
∗
f
)
(
n
)
=
V
g
θ
V
T
f
(10)
(g*f)(n)=Vg_{\theta}V^{T}f\tag{10}
( g ∗ f ) ( n ) = V g θ V T f ( 1 0 )
论文中所给的频域公式为:
x
k
+
1
,
j
=
h
(
V
∑
i
=
1
f
k
−
1
F
k
,
i
,
j
V
T
x
k
,
i
)
(11)
x_{k+1,j}=h(V\sum_{i=1}^{f_{k-1}}{F_{k,i,j}V^{T}x_{k,i}})\tag{11}
x k + 1 , j = h ( V i = 1 ∑ f k − 1 F k , i , j V T x k , i ) ( 1 1 )
在式(11)中
F
k
,
i
,
j
F_{k,i,j}
F k , i , j
g
θ
g_{\theta}
g θ
x
k
,
i
就
是
f
x_{k,i}就是f
x k , i 就 是 f
f
f
f
x
x
x
x
k
,
i
x_{k,i}
x k , i
F
k
,
i
,
j
F_{k,i,j}
F k , i , j
j
j
j
i
i
i
h
(
∗
)
h(*)
h ( ∗ )
论文其他内容: