RT-Thread Stm32f103开启UART2 使用RT-Thread Studio
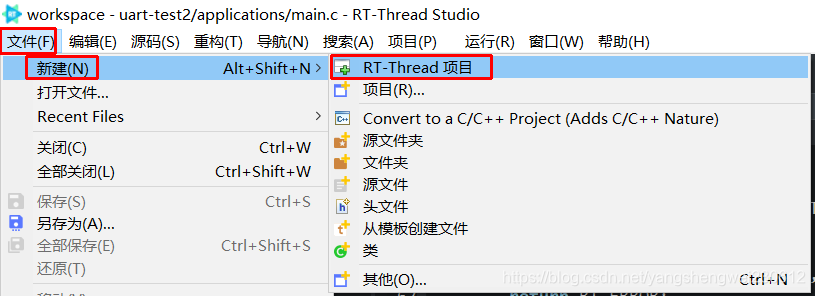
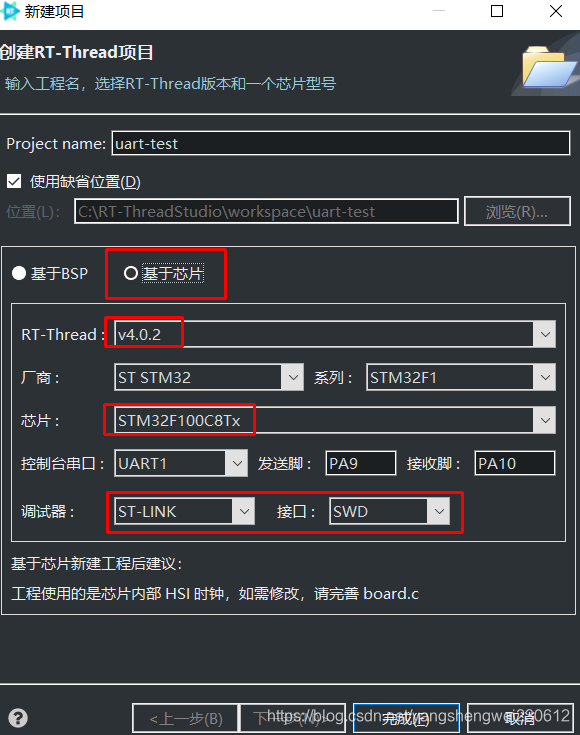
1. 使用RT-Thread Studio新建RT-Thread项目
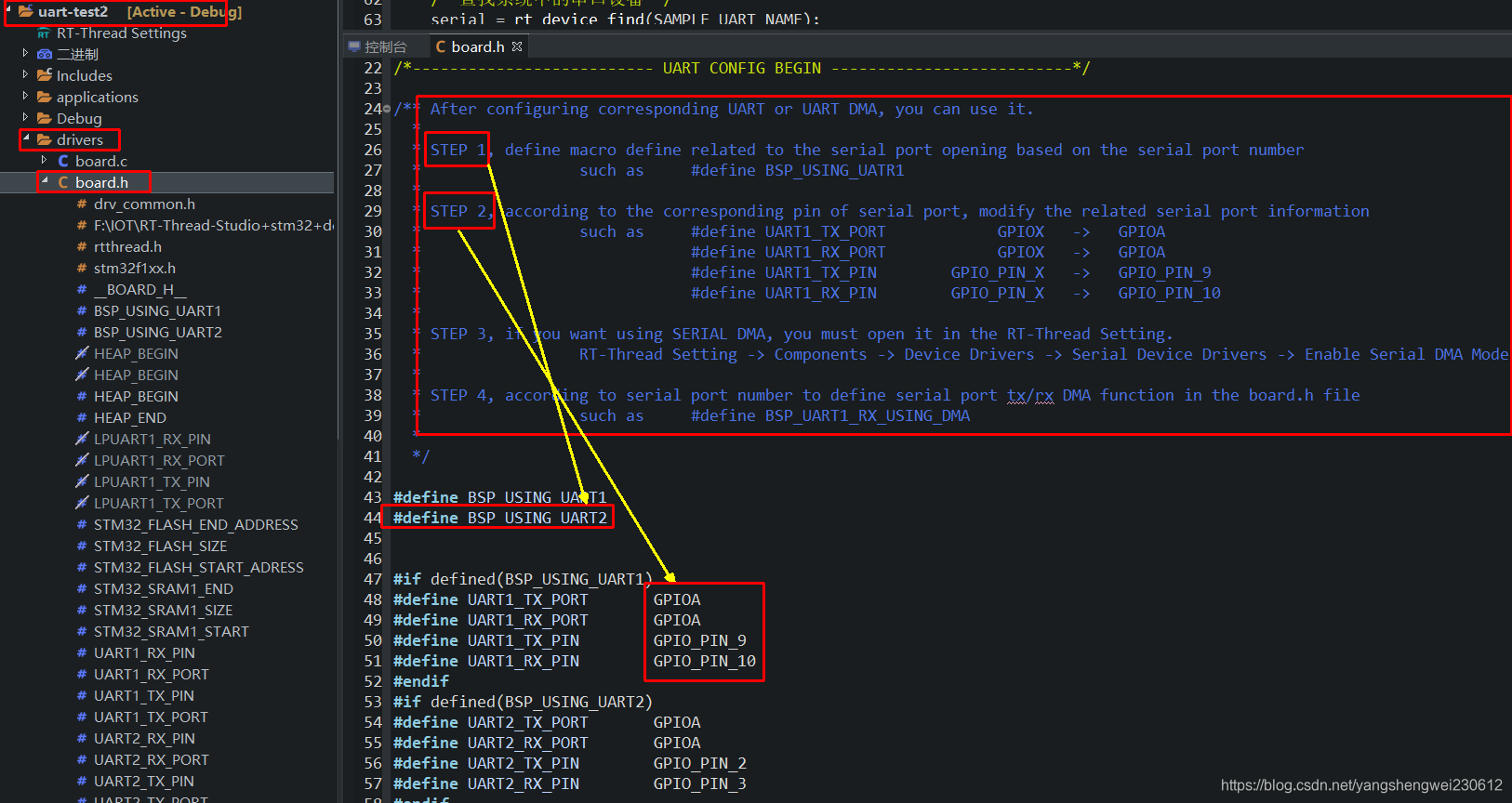
2. 修改dricer->doard.h
- 增加UART2的宏定义
- 设置gpio接口
3. mian.c
串口设备使用示例
中断接收及轮询发送
示例代码的主要步骤如下所示:
首先查找串口设备获取设备句柄。
初始化回调函数发送使用的信号量,然后以读写及中断接收方式打开串口设备。
设置串口设备的接收回调函数,之后发送字符串,并创建读取数据线程。
读取数据线程会尝试读取一个字符数据,如果没有数据则会挂起并等待信号量,当串口设备接收到一个数据时会触发中断并调用接收回调函数,此函数会发送信号量唤醒线程,此时线程会马上读取接收到的数据。
此示例代码不局限于特定的 BSP,根据 BSP 注册的串口设备,修改示例代码宏定义 SAMPLE_UART_NAME 对应的串口设备名称即可运行。
#include <rtthread.h>
#include <board.h>
#include <rtdevice.h>
#define DBG_TAG "main"
#define DBG_LVL DBG_LOG
#include <rtdbg.h>
#define SAMPLE_UART_NAME "uart2"
/* 用于接收消息的信号量 */
static struct rt_semaphore rx_sem;
static rt_device_t serial;
/* 接收数据回调函数 */
static rt_err_t uart_input(rt_device_t dev, rt_size_t size)
{
/* 串口接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */
rt_sem_release(&rx_sem);
return RT_EOK;
}
static void serial_thread_entry(void *parameter)
{
char ch;
while (1)
{
/* 从串口读取一个字节的数据,没有读取到则等待接收信号量 */
while (rt_device_read(serial, -1, &ch, 1) != 1)
{
/* 阻塞等待接收信号量,等到信号量后再次读取数据 */
rt_sem_take(&rx_sem, RT_WAITING_FOREVER);
}
/* 读取到的数据通过串口错位输出 */
ch = ch;
rt_device_write(serial, 0, &ch, 1);
}
}
static int uart_sample()
{
rt_err_t ret = RT_EOK;
char uart_name[RT_NAME_MAX];
char str[] = "hello RT-Thread!\r\n";
/* 查找系统中的串口设备 */
serial = rt_device_find(SAMPLE_UART_NAME);
if (!serial)
{
rt_kprintf("find %s failed!\n", uart_name);
return RT_ERROR;
}
/* 初始化信号量 */
rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
/* 以中断接收及轮询发送模式打开串口设备 */
rt_device_open(serial, RT_DEVICE_FLAG_INT_RX);
/* 设置接收回调函数 */
rt_device_set_rx_indicate(serial, uart_input);
/* 发送字符串 */
rt_device_write(serial, 0, str, (sizeof(str) - 1));
/* 创建 serial 线程 */
rt_thread_t thread = rt_thread_create("serial", serial_thread_entry, RT_NULL, 1024, 25, 10);
/* 创建成功则启动线程 */
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
ret = RT_ERROR;
}
return ret;
}
int main(void)
{
uart_sample();
return RT_EOK;
}
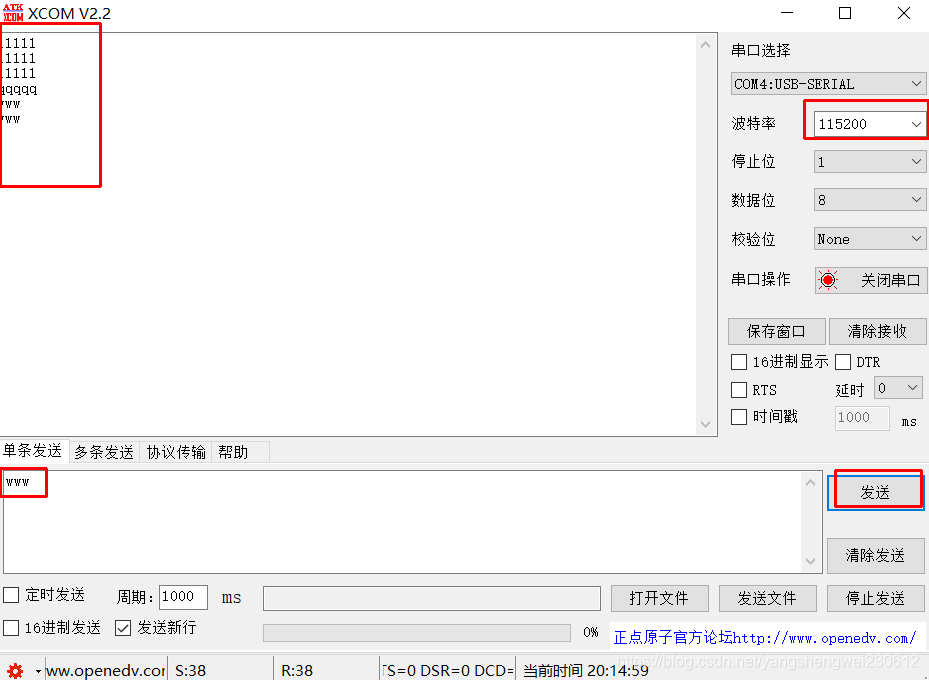
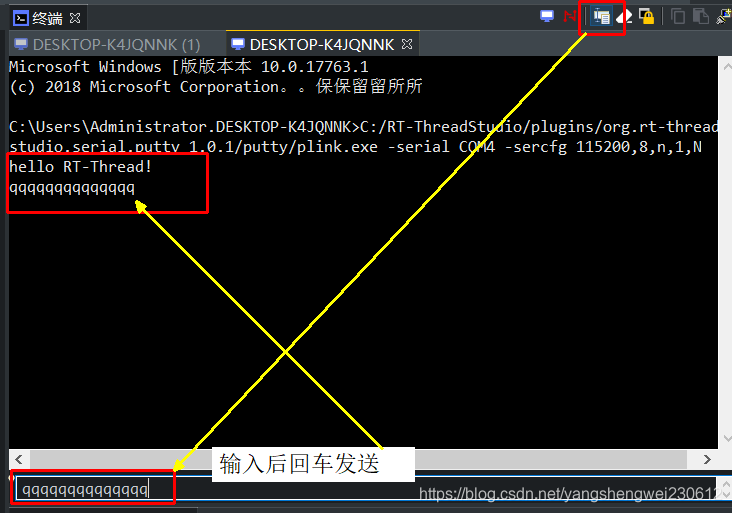
4. 运行结果
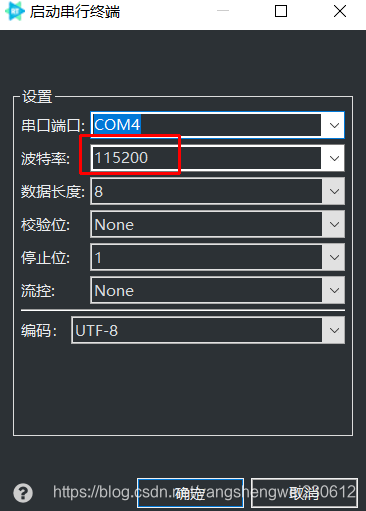
默认波特率为115200
- 串口调试工具
- 也可以用RT-Thread Studio自带的串口调试工具
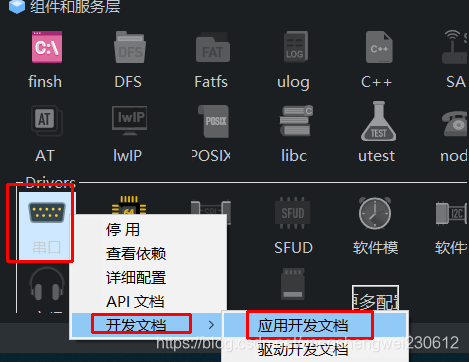
5. 具体使用可以查看RT-Thread提供串口应用开发文档