特征值和特征向量
特征值和特征向量的定义如下:
Ax=λx
其中
A是一个
n×n的实对称矩阵,
x是一个
n维向量,则我们说
λ是矩阵
A的一个特征值,而
x是矩阵
A的特征值
λ所对应的特征向量。
特征值和特征向量的好处:
我们可以将矩阵
A特征分解。如果我们求出了矩阵
A的
n个特征值
λ1≤λ2≤...≤λn,以及这
n个特征值所对应的特征向量
w1,w2,...wn,如果这
n个特征向量线性无关,那么矩阵
A就可以用下式的特征分解表示:
A=WΣW−1
其中
W是这
n个特征向量所组成的
n×n维矩阵,而
Σ为这
n个特征值为主对角线的
n×n维矩阵。
一般我们会把
W的这
n个特征向量标准化,即满足
∣∣wi∣∣2=1,或者说
wiTwi=1,此时
W的
n个特征向量为标准正交基,满足
WTW=I,即
WT=W−1,也就是说
w为酉矩阵。
这样我们就可以将特征分解表达式写成:
A=WΣWT
注意到要进行特征分解,矩阵
A必须为方阵。那么如果
A不是方阵,即行和列不相同时,我们还可以对矩阵进行分解吗?
当然是可以的,SVD就是这样的。
SVD的定义
SVD也是对矩阵进行分解,但是和特征分解不同,SVD并不要求要分解的矩阵为方阵。假设我们的矩阵
A是一个
m×n的矩阵,那么我们定义矩阵
A的SVD为:
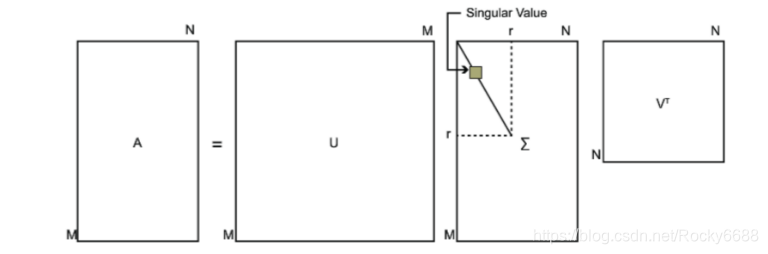
A=UΣVT
其中
U是一个
m×m的矩阵,
Σ是一个
m×m的矩阵,除了主对角线上的元素以外全为0,主对角线上的每个元素都称为奇异值,
V是一个
n×n的矩阵。
U和
V都是酉矩阵,即满足
WTW=I,
VTV=I。下图可以很形象的看出上面SVD的定义:
那么我们如何求出SVD分解后的
U,Σ,V这三个矩阵呢?
如果我们将
A的转置和
A做矩阵乘法,那么会得到
n×n的一个方阵
ATA。既然
ATA是方阵,那么我们就可以进行特征分解,得到的特征值和特征向量满足下式:
(ATA)vi=λivi
这样我们就可以得到矩阵
ATA的
n个特征值和对应的
n个特征向量
v了。将
ATA的所有特征向量组成一个
n×n的矩阵
V,就是我们SVD公式里的
V矩阵了。一般我们将
V中的每个特征向量叫做
A的右奇异向量。
如果我们将
A和
A的转置做矩阵乘法,那么会得到
m×m的一个方阵
AAT。既然
AAT是方阵,那么我们就可以进行特征分解,得到的特征值和特征向量满足下式:
(AAT)ui=λiui
这样我们就可以得到矩阵
AAT的
m个特征值和对应的
m个特征向量
u了。将
AAT的所有特征向量组成一个
m×m的矩阵
U,就是我们SVD公式里面的
U矩阵了。一般我们将
U中的每个特征向量叫做
A的左奇异向量。
U和
V我们都求出来了,现在就剩下奇异值矩阵
Σ没有求出来了。由于
Σ除了对角线上是奇异值其他位置都是0,那么我们只需要求出每个奇异值
σ就可以了。
我们注意到:
A=UΣVT⇒AV=UΣVTV⇒AV=UΣ⇒Avi=σiui⇒σi=uiAvi
这样我们可以求出我们的每个奇异值,进而求出奇异值矩阵
Σ。

SVD计算举例

SVD的一些性质
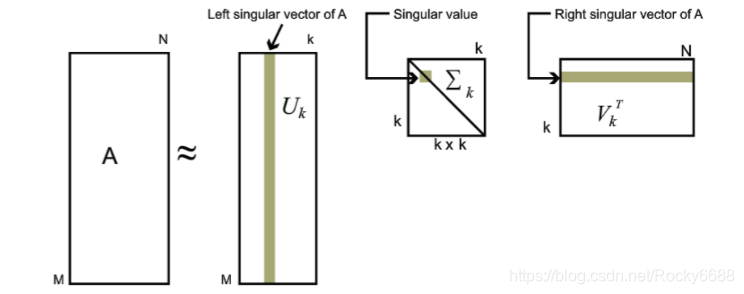
对于奇异值,它跟我们特征分解中的特征值类似,在奇异值矩阵中也是按照从大到小排列,而且奇异值的减少特别的快,在很多情况下,前10%甚至1%的奇异值的和就占了全部的奇异值之和的99%以上的比例。也就是说,我们也可以用最大的k个的奇异值和对应的左右奇异向量来近似描述矩阵。也就是说:
Am×n=Um×mΣm×nVn×nT≈Um×kΣk×kVk×nT
其中
k要比
n小很多,也就是一个大的矩阵
A可以用三个小的矩阵
Um×k,Σk×k,Vk×nT来表示。如下图所示,现在我们的矩阵
A只需要灰色的部分的三个小矩阵就可以近似描述了。
由于这个重要的性质,SVD可以用于PCA降维,来做数据压缩和去噪。也可以用于推荐算法,将用户和喜好对应的矩阵做特征分解,进而得到隐含的用户需求来做推荐。同时也可以用于NLP中的算法,比如潜在语义索引(LSI)。
SVD小结
SVD作为一个很基本的算法,在很多机器学习算法中都有它的身影,特别是在现在的大数据时代,由于SVD可以实现并行化,因此更是大展身手。SVD的原理不难,只要有基本的线性代数知识就可以理解,实现也很简单因此值得仔细的研究。当然,SVD的缺点是分解出的矩阵解释性往往不强,有点黑盒子的味道,不过这不影响它的使用。
