Notas del estudio ROS cuatro
1. Espacio de trabajo
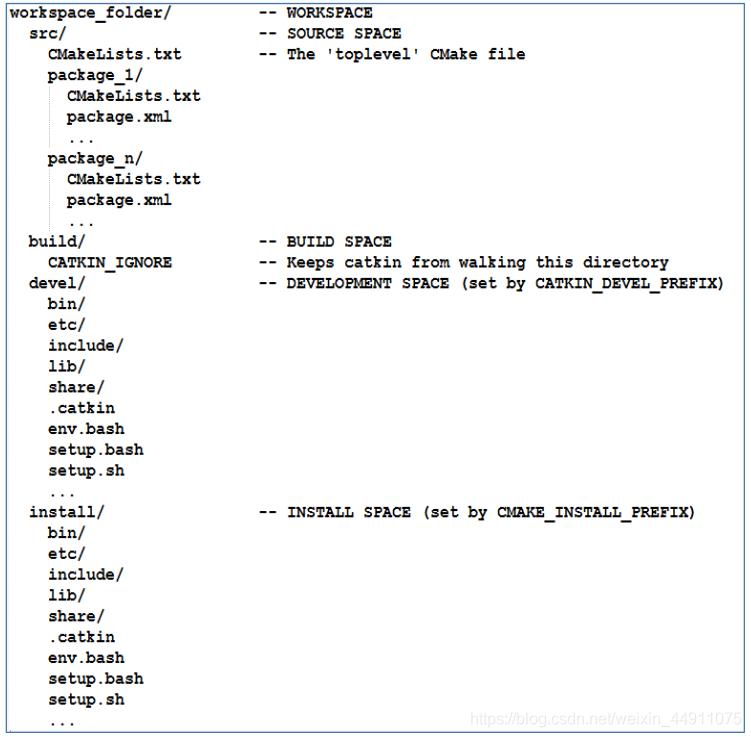
Workspace (espacio de trabajo) es una carpeta donde se almacenan los archivos relacionados con el desarrollo del proyecto. Similar al archivo de proyecto que creamos en el sistema de Windows.
src-Source Space
Coloque el paquete de funciones, incluido su código, archivos de configuración, etc.
construir-construir espacio
Coloque los archivos intermedios generados durante el proceso de compilación.
espacio de desarrollo
Coloque los archivos ejecutables compilados, bibliotecas, scripts, etc.
instalar-instalar espacio
Almacene los archivos después de que el comando de instalación se haya instalado correctamente.
La siguiente imagen es de Gu Yue "Introducción a las conferencias ROS 21"
Dos, crea un espacio de trabajo
Crea un espacio de trabajo
$ mkdir -p ~/catkin_ws/src
$ cd~/catkin_ws/src
$ catkin_init_workspace
El nombre del espacio de trabajo se puede personalizar, pero debe ser src
mkdir -p: crea un directorio de forma recursiva, incluso si el directorio superior no existe, el directorio se creará automáticamente de acuerdo con la jerarquía de directorios.
catkin_init_workspace: inicializa la carpeta como un atributo de espacio de trabajo.

Compilar espacio de trabajo
$ cd~/catkin_ws/
$ catkin_make
Vuelva al directorio raíz del espacio de trabajo para compilar.
 Usar en el directorio raíz
Usar en el directorio raíz
$ catkin_make install
Puede generar carpeta de instalación

Establecer variables de entorno
$ source devel/setup.bash
Verifique las variables de entorno
$ echo $ROS_PACKAGE_PATH
Tres, crea un paquete de funciones
catkin_create_pkg package_name depend1 depend2 depend3 package_name
: el nombre del
paquete de funciones depende: la dependencia requerida por el paquete de funciones. En el
mismo espacio de trabajo, no se permite ningún paquete de funciones con el mismo nombre, y los paquetes de funciones con el mismo nombre están permitidos en diferentes espacios de trabajo .
Crear paquete de funciones
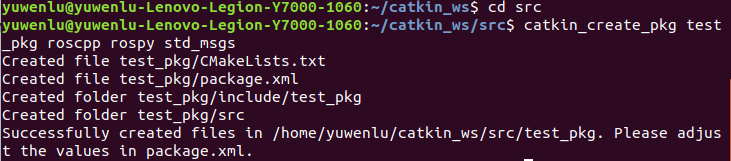
$ cd/catkin_ws/src
$ catkin_create_pkg test_pkg std_msgs rospy roscpp
std_msgs: estructura de información estándar definida por ROS,
 entre ellos:
entre ellos:
CMakeLists.txt y package.xml son los dos archivos que debe tener cada paquete de funciones, los cuales pueden distinguir la carpeta del paquete de funciones y la carpeta ordinaria.
Compilar paquete de funciones
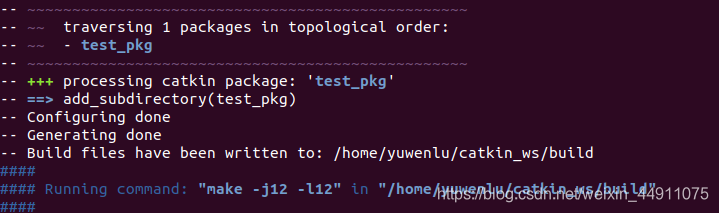
$ cd~/catkin_ws
$ catkin_make
$ source~/catkin_ws/devel/setup.bash
 Cuando desee ejecutar un paquete de funciones de programa, debe establecer la variable de entorno que
Cuando desee ejecutar un paquete de funciones de programa, debe establecer la variable de entorno que
 se puede usar el espacio de trabajo
se puede usar el espacio de trabajo
$ echo $ROS_PACKAGE_PATH
comprobación

archivo package.xml
Este archivo almacena la información relevante del paquete de funciones, autor, versión, nivel de fuente abierta, etc. y la dependencia del paquete de funciones. Las nuevas dependencias posteriores se pueden agregar manualmente aquí.
cMakeList.txt
Describe las reglas de compilación del paquete de funciones.
Enlace anterior
Notas de estudio de ROS tres (uso de herramientas de línea de comandos de
ROS ) Notas de estudio de ROS dos (conceptos básicos de ROS )
Notas de estudio de ROS una (operación básica del sistema Linux)