Espacio de trabajo
Características
1. La función principal del espacio de trabajo es almacenar archivos de proyecto y códigos de archivo (una carpeta donde se almacenan el espacio de trabajo y el código)
2. El desarrollo de ROS depende del espacio de trabajo
3. La escritura y la compilación del código fuente se realizan en el espacio de trabajo
4. Hay tres carpetas (src, build, devel) en el directorio del espacio de trabajo general
- La carpeta src contiene el código de usuario original, que es el paquete de funciones
- La carpeta bulid contiene archivos intermedios generados durante el proceso de compilación
- La carpeta devel es el archivo de destino generado por la compilación, es decir, algunos archivos ejecutables
5, las carpetas de build y devel se pueden ignorar en el proceso de usar ros
Crea un espacio de trabajo
Hay tres pasos
1. Cree una carpeta
mkdir -p ~/new_wheeltec/src
Explicación:
① mkdir: crear instrucción de carpeta
② -p: verifica si existe esa carpeta
en la ruta ③ crear carpeta new_wheeltec en el archivo de inicio
④ También hay una carpeta src en la carpeta new_wheeltec
2. Ingrese a la carpeta
cd ~/new_wheeltec/src /src
3. Inicialice el espacio de trabajo
catkin_init_workspace
Requisitos: inicializar en segundos
Compilar
(Requisito: debe estar compilado en el entorno del espacio de trabajo)
-
Espacio de trabajo completo
catkin_make -
Compilar un paquete de función única
catkin_make -DCATKIN_WHITELIST_PACKAGES="package_name" -
Después de compilar un solo paquete de funciones, quiero volver a compilar todo el espacio de trabajo
catkin_make -DCATKIN_WHITELIST_PACKAGES="" -
Hilo de compilación personalizado (velocidad de compilación)
catkin_make -j-l catkin_make -j2-l2
Explicación:
- ① -j significa una tarea que -job puede realizar sincrónicamente
- ② -l es --load-average significa el número de tareas cargadas por el sistema
- ③ Cuanto mayor sea el número de tareas, más rápida será la compilación y mayores serán los requisitos de CPU
Agregar variables de entorno
Comprensión
1. Después de compilar el espacio de trabajo, necesitamos agregar una variable de entorno del espacio de trabajo.
2. La función es decirle al sistema que esta es una ruta de nuestro espacio de trabajo, para que podamos ser indexados correctamente cuando ejecutamos los programas en el espacio de trabajo
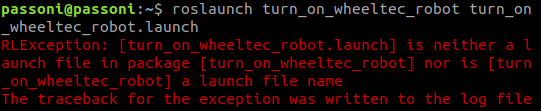
Si no agregamos variables de entorno y
ejecutamos un paquete de funciones para probar, el resultado es el que se muestra en la figura.
roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch
Después de agregar variables de entorno
① Agregar variables de entorno
source devel/setup.bash
② Verifique si la adición es exitosa
echo $ROS_PACKAGE_PATH

Esta es la ruta
/ home / passoni / catkin_ws / src donde acabamos de agregar una variable de entorno
③ Vuelva a ejecutar un archivo .launch ahora mismo
roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch

- Se puede ver que se ha indexado correctamente, pero abrir este paquete de funciones necesita abrir el contenido de otro paquete de funciones, por lo que se termina en medio de la operación.
- Este método de agregar variables de entorno está realmente limitado al terminal actual.
Agregar variables de entorno global①
Editar un archivo .bashrc
nano .bashrc
-
Desliza hacia abajo
-
la fuente es nuestra variable de entorno
② Agregamos otra línea, y luego ingresamos la ruta del espacio de trabajo que acabamos de tener.
Pace La ruta del espacio de trabajo es seguida por un devdel / setup.bash
④ Haga esto nuevamentesource .bashrc⑤ Ejecute un archivo .launch ahora mismo
roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch