一、基本概念和加速比
1、基本概念
1).处理机的时间积
处理机数目与处理时间的乘积用以度量这些处理机运行时的资源利用率。
若程序在P台处理机上运行的时间为Tp,则此P台处理机在Tp时间间隔内完成的工作最大数量为Tp * P。
可以将处理机实际工作曲线对时间的积分看成是这些处理机完成的有效工作量。
效率为有效工作量与最大工作量之比。
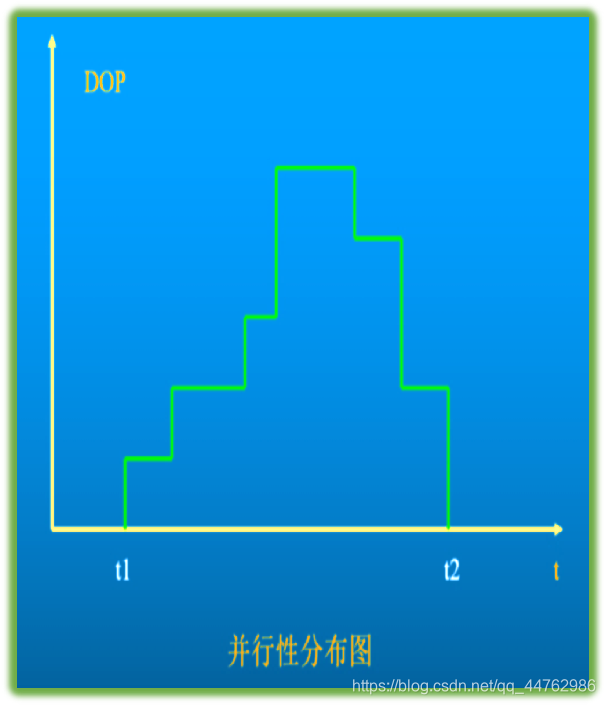
2).并行度(Degree Of Parallelism—DOP)
并行度是在一定时间间隔内执行一个程序所用的处理机的数目。
3).并行性分布图
执行一个给定的程序时并行度对时间的分布图。
并行度与对应时间的间隔之积即为处理机要完成的工作或工作负载。
如图所示为一个并行性分布图。
2 .加速比
1). 绝对加速比
将最好的串行算法与并行算法相比较.(这里的“最好的”不是绝对的,有时处理最快的是最好的,有时的到最优解的是最好的,有时会把最快和最优结合起来,所以具体问题具体分析)
定义一(与具体机器有关)将最好的串行算法在一台上的运行时间与并行算法在N台运行的时间相比。
定义二(与具体机器无关)将最好的串行算法在最快的顺序机上的执行时间与并行算法在并行机上的运行时间相比。
(分子表示串行机,分母表示并行机)
2).相对加速比
同一并行算法在单节点上运行时间与在多个相同节点构成的处理机系统上的运行时间之比。
这种定义侧重于描述算法和并行计算机本身的可扩展性。
由S表示形式,可以看出随着处理器数量N的增加,加速比S在增大,如果这种增加呈现线性关系,就称之为线性加速比;如果这种增加速度呈现超线性关系,就称之为超线性加速比;如果S增长速度逐渐呈现递减关系,就称之为病态加速比。
线性加速比:中间开销小,通信少,弱耦合计算
超线性加速比:当应用需要大内存时可能出现
病态加速比:加速比递减,可能是计算量太小
二、加速比性能模型(三种)
1.固定负载加速比性能模型—Amdahl定律
在许多实时应用领域,计算负载的大小经常固定。在并行机中,此负载可分布至多台并行执行,获得的加速比称为fixed-load speedup。一个问题的负载可表示如下:
W = Ws + Wp
其中,Ws代表问题中不可并行化的串行部分负载, Wp表示可并行化的部分负载。
则n个节点情况下,加速比可以表示如下:
设串行因子α为串行部分所占的比例。即:

代入即得Amdahl’law:
不管采用多少处理机,可望达到的最好加速比:

效率En可以表示为:

处理机数目n越大,效率En越低。
Amdahl定律告诉我们:系统中某一部件由于采用某种更快的执行方式后整个系统性能的提高与这种执行方式的使用频率或占总执行时间的比例有关。

加速比的两个决定因素:
1).计算机执行某个任务的总时间中可被改进部分的时间所占的百分比,即可被改进部分占用时间/改进前整个任务的执行时间,记为Fe,它总小于1。
2).改进部分采用改进措施后比没有采用改进措施前性能提高的倍数,即
改进前改进部分执行时间/改进后改进部分执行时间,记为Se。
例1:
假设将某系统的某一部件的处理速度加快到10倍,但该部件的原处理时间仅为整个运行时间的40%,则整个系统的性能提高了多少?
解:Fe = 0.4,Se = 10,
Amdahl’law又称为固定规模加速比模型,问题规模不随处理机变化而变化。固定问题规模,看用并行技术能达到的最短时间是多少。
在固定规模加速比模型下,负载和执行时间随系统中处理机数目n变化的情况如下图:
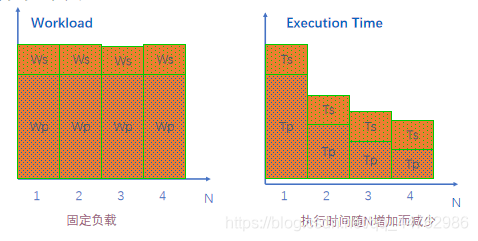
(不管处理机数量有多少,串行和并行的负载都是固定的。但是串行的工作时间是固定的,并行随着处理机的增加,所用的工作时间在减少,而总的时间也随着处理机的增大而减小)
当处理器数目n=1024,加速比Sn随α变化的情况如下:

得出曲线如下图:
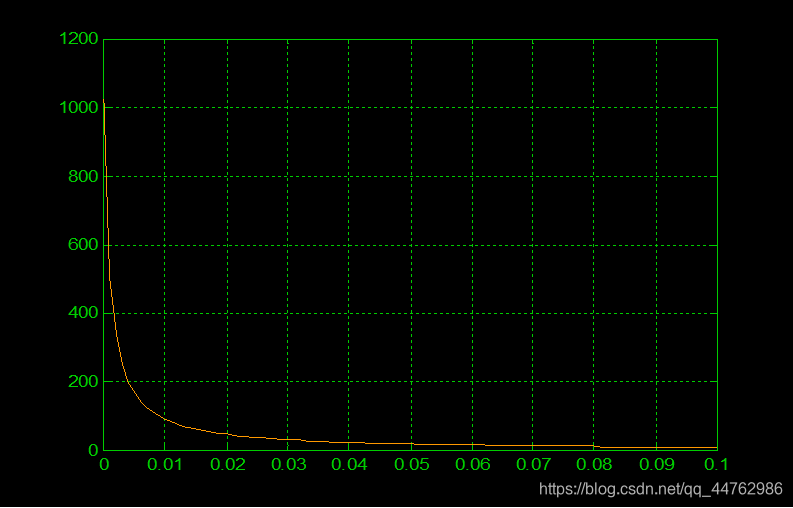
可以比较不同的α对加速比带来的不同影响:
(红色曲线为α=0,红色下边为α=0.01,蓝色为α=0.1,蓝色下边为α=0.9)
α=0时得到理想加速比,当α值增加时,加速比性能急剧下降。
**结论:**加速比曲线随α的上升急剧下降,原因是存在顺序部分Ws,无法用增加系统的处理机数目来解决。这一性质在过去二十年间给人们造成了对并行处理非常悲观的印象。
影响:两种意见:
1).劝阻制造商生产大规模并行计算机。(当然与实际情况是不相符的,现在的处理机数量一直在增加。)
2).研究并行编译器,以降低α的值,从而提高系统的性能。
规定负载加速比模型的可能应用范围:
对时间要求严格的应用问题。
2.固定时间加速比性能模型—Gustafsun定律
有许多应用领域强调精度而不是运行时间。1988年,Gustafsun提出了固定时间加速比模型。当机器的规模扩大时,解题的规模也随着扩大,从而得到更加精确的解,而使运行时间保持不变。
比如:有限元方法做结构分析,流体动力学做天气预报解PDE(偏微分方程组)就需要提高精度。
粗格要求的计算量较少,而细格的计算量多,得到的精确度也较高。天气预报模拟求解四维PDE,如果使每个实际方向(X,Y,Z)的格点距离减少到原来的十分之一,并以同一幅度增加时间步,那么可以说格点增加了104倍,因而工作负载也至少增大了10000倍。
模型提出的背景:
固定负载模型有缺陷:因为Amdahl’law中,α取决于问题及并行编译器的效率,无法描述系统固有的特性。
加速比的公式:

其中,Wp’=nWp和Ws+Wp=Ws’+Wp’/n作为固定时间的条件。 Ws’+Wp’/n表示在扩大负载后在增加处理机台数的情况下的平均负载(执行时间),它应当和负载没有扩大情况下的平均负载(执行时间)Ws+Wp相等。即有Ws+Wp=Ws’+Wp’/n。同时,负载的串行部分并没有改变,即有Ws=Ws’。
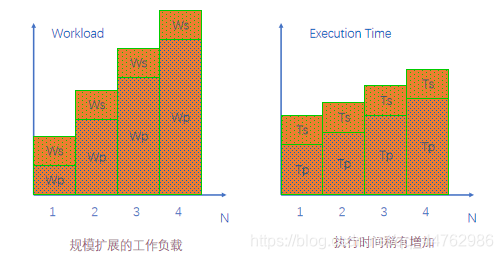
在固定时间加速比模型下,负载和执行时间随系统中处理机数目n变化的情况如下图:
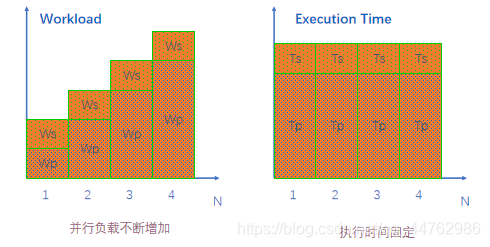
增大问题规模的办法使所有处理机保持忙碌状态,在问题扩大到与可用的计算能力匹配时,程序中的顺序部分就不再是瓶颈了。
当处理器数目n=1024,加速比Sn随α变化的情况如下:

3.受限于存储器的加速比模型
1993年,由Sun和Ni提出。
大型科学计算和工程设计需要较大的存储空间,许多应用问题是存储器受限,而不是CPU受限或者I/O受限。
比如:在分布存储系统中常遇到,总存储容量随节点数线性增加,许多节点集合起来解一个大题。
基本思想:要在存储空间有限条件下解尽可能大的问题,这同样需要扩展工作负载,才能提供较高的加速比、较高的精度和较好的资源利用率。
加速比可以表示如下:
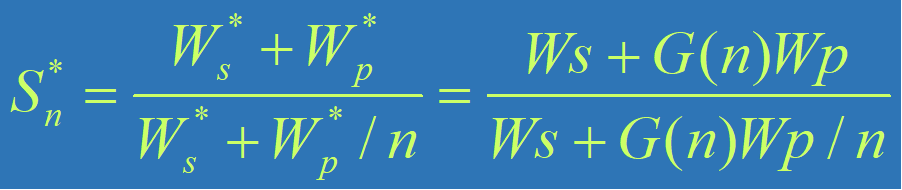
其中:
在单个处理机上顺序执行的工作负载与问题的规模或系统的规模无关,即:

而G(n)反映的是存储容量增加n倍时并行工作负载增加的倍数。
讨论:
1.G(n) = 1,即为固定负载的情况;
2.G(n) = n,即存储器增加n倍,负载也增加n倍,为固定时间的情形;
3.G(n) > n,计算负载的增加情况比存储器增加快,会有较高的加速比。
比较三种加速比,对于相同的处理机数量,有:

(Sun.Ni模型大于等于Gustafsun模型大于等于Amdahl模型)
在受限于存储器的加速比模型下,负载和执行时间随系统中处理机数目n变化的情况如下图:
例:n维矩阵乘法:A * B = C,其中A、B、C都是n*n的方阵。为得到C的每一个元素需要进行n次乘法、n次加法,所以总的计算量为:(n+n)n2 = 2n3。需要的存储量为3n2(两个源矩阵,一个结果矩阵)。如果n台计算机组成多计算机系统,则存储容量扩大n倍,那么矩阵的维数(原来为n)也可以增加了,设为N倍,那么加速比为多少解:存储容量变为:nM = n 3n2 = 3n3,而N维需要的存储量为3N2,计算量变为2N3,则有:



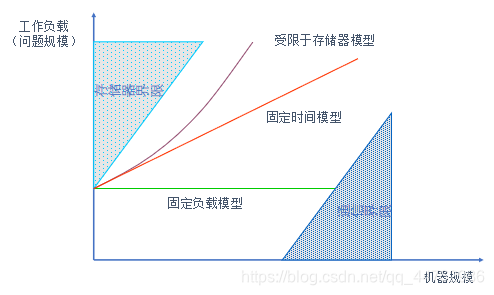
4.并行计算的应用模型
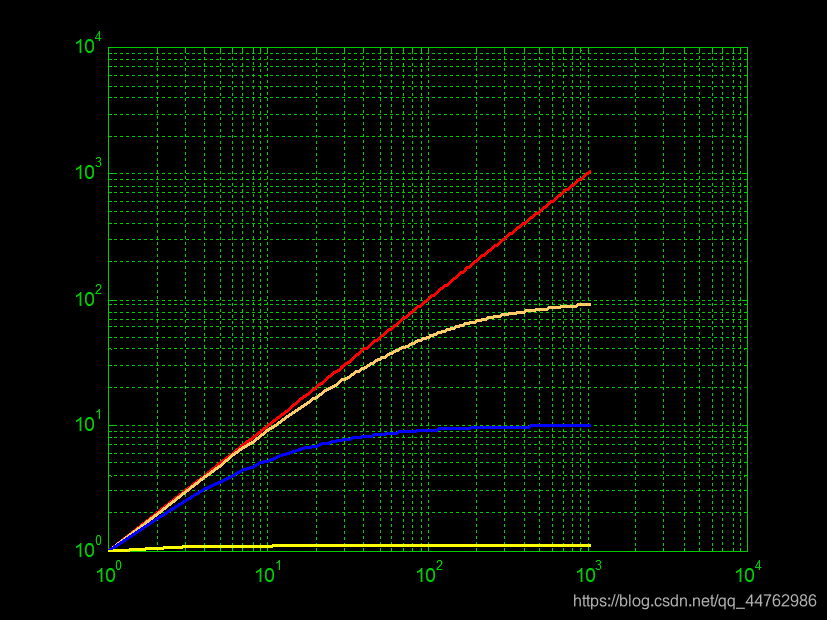
随机器规模的增大,工作负载增长的模式如下图:
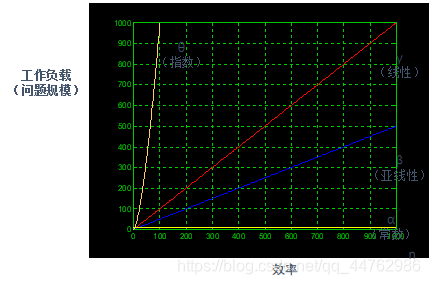
上图中:
采用受限于存储器的加速比模型中给出的公式,
θ曲线对应的G(n) = n的1.5次方(靠近y轴)
γ曲线对应的G(n) = n(红色)
β曲线对应的G(n) = 0.5n(蓝色)
α曲线对应的G(n) = 1(靠近x轴)
则有加速比公式:
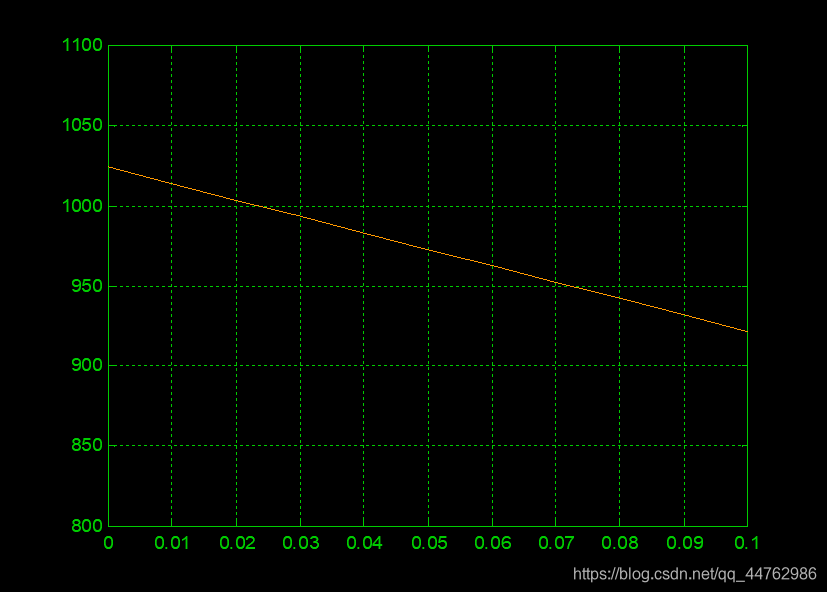
给定一个程序,假设Ws/Wp = 0.4,那么效率为:
相应的处理器数目—效率曲线如下图:
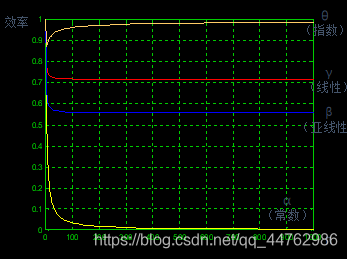
相关结论:
1.如果工作负载(问题规模)保持不变,那么效率E随机器规模的增大而迅速下降,其原因是开销h比机器规模增加得快,为了使效率保持在一定的水平上,我们可以按比例增大机器规模和问题规模。
2.如果工作负载按指数增长模式,效率要保持恒定或保持良好的加速比,必须使问题规模猛增才行,这样就会超过存储器或I/O限制,而问题规模只允许在计算机存储器可用的限度以内增长。
并行计算机的应用模型如下图: