本章笔记会有部分选取自《3D数学基础:图形与游戏开发》一书
仿射变换:包括平移和线性变换(旋转、切变等)
使用齐次坐标表示时,向量表示为(x, y, z, 0),而点表示为(x, y, z, 1)。
4.1基本变换(Basic Transforms)

4.1.1平移(Translation)
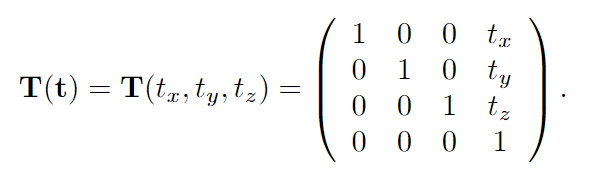
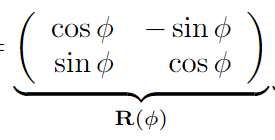
4.1.2旋转(Rotation)
与平移同样,是一种刚体变换(rigid-body transform),即,它保留了变换点之间的距离,并保留了手性(handedness)(即不会翻转左右)
绕原点逆时针旋转φ°的旋转矩阵R(2D):
绕单个坐标轴逆时针旋转φ°的旋转矩阵R(3D):

4.1.3缩放(Scaling)
沿坐标轴缩放
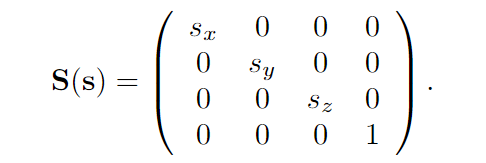
若缩放矩阵中含有一个或三个比例因子为负值,则其表示一种反射矩阵,也称为镜像矩阵。
如果只有两个比例因子为-1,那么将旋转弧度π。
反射矩阵被检测到时,通常会被“特殊对待”。
例如,当顶点由逆矩阵转换时,其顶点具有逆时针顺序的三角形将得到顺时针顺序。此顺序更改可能导致不正确的照明和背面剔除。
沿特定轴缩放:
4.1.4切变(Shearing)

4.1.5变换的连接(Concatenation of Transform)
以上的基本仿射变换都可以通过左乘点的方式连接起来,如:
TRSp即为先缩放再旋转再平移,矩阵的位置不得交换(满足结合律但不满足交换律)

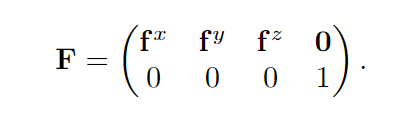
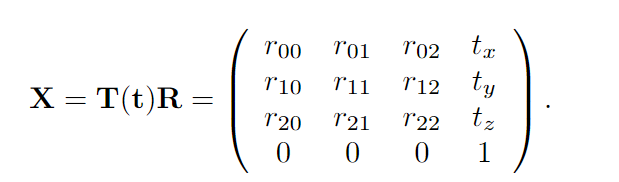
4.1.6刚体变换(The Rigid-Body Transform)
不涉及图像的形状变化的变换——刚体变换,其变换矩阵X写作以下形式:
4.1.7法线变换(Normal Transform)
法线常常不能与物体做相同的变换,如图:

代替乘以矩阵本身,合适的方法是使用变换矩阵的伴随矩阵的转置矩阵。
4.1.8逆计算(Computation of Inverses)
在许多情况下,例如在坐标系之间来回切换时,需要逆矩阵。
根据有关转换的可用信息,可以使用以下三种计算矩阵逆的方法之一:
- 如果矩阵是单个变换或具有给定参数的简单变换序列,则可以通过“反转参数”矩阵阶数来轻松计算矩阵。如,M = T(t)R(φ),则M^(-1) = R(-φ)T(-t)。
- 如果已知矩阵正交,即转置为逆。
- 如果什么都不知道,则可以使用伴随方法,克莱默法则,LU分解或高斯消去法来计算逆。通常最好使用Cramer规则和伴随方法,因为它们的分支运算较少。
4.2特殊的矩阵运算和变换(Special Matrix Transform and Operation)
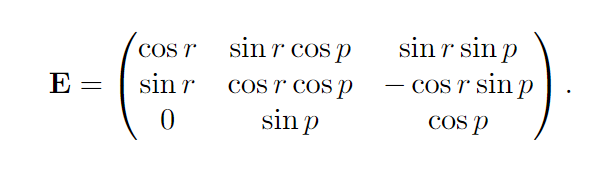
4.2.1 欧拉变换(The Euler Transform)

矩阵的顺序可以以24种(24种应该是以A44算得,但是明明只有3个矩阵,难道E矩阵也算在内?)不同的方式选择,这是最常用的一种。
优点:
- 使用直观、方便
- 任意数值都是合法的
- 最简洁的表达方式
缺点:
- 不方便差值(不同的值也可以表示同一个角)
- 存在万向锁问题
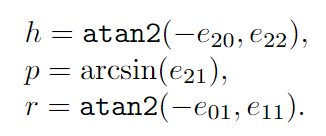
4.2.2 从欧拉变换中提取参数


4.2.3 矩阵分解(Matrix Decomposition)
从级联矩阵中检索各种变换的任务称为矩阵分解
检索一组转换的原因很多,包括:
- 仅提取对象的比例因子
- 查找特定系统所需的变换。 (例如,某些系统可能不允许使用任意4x4矩阵。)
- 确定模型是否仅经历了刚体变换。
- 在动画中的关键帧之间进行插值,其中只有对象的矩阵可用。
- 从旋转矩阵中剪切。
4.2.4 绕任意轴旋转(Rotation about an Arbitrary Axis)

4.3 四元数(Quaternions)
优点:
- 平滑插值。slerp 和 squad 提供了方位间的平滑插值,没有其他方法能提供平滑插值。
- 快速连接和角位移求逆。四元数叉乘能将角位移序列转换为单个角位移,用矩阵作同样的操作明显会慢一些。四元数共提供了一种有效计算反角位移的方法,通过转置旋转矩阵也能达到同样的目的,但不如四元数来得容易。
- 能和矩阵形式快速转换。四元数和矩阵间的转换比欧拉角与矩阵之间的转换稍微快一点。
- 仅用四个数。四元数仅包含4个数,而矩阵用了9个数,它比矩阵“经济”得多(当然仍然比欧拉角多33%)。
缺点:
- 比欧拉角稍微大一些。这个额外的数似乎没有太大关系,但在需要保存大量角位移时,如存储动画数据,这额外的33%也是数量可观的。
- 四元数可能不合法。坏的输入数据或浮点数舍入误差积累都可能使四元数不合法(能通过四元数标准化解决这个问题,确保四元数为单位大小)。
- 难于使用。在所有三种形式中,四元数是最难于直接使用的。
四元数q可如下定义:

四元数相乘:

相加、共轭、规范化、四元数i

----以下省略许多四元数计算公式----
4.4 顶点混合(Vertex Blending)

缺点是可能会发生不必要的折叠,扭曲和自相交
4.5 变形(Morphing)
假设一个模型在时间t0显示,我们希望它在时间t1变为另一种模型。
对于t0和t1之间的所有时间,都使用某种插值获得了一个连续的混合”模型,此即为变形。
变形涉及解决两个主要问题,即顶点对应问题和插值问题。
通常用于一些运动或表情变化。
4.6 几何高速缓存回放(Geometry Cache Playback)
目的:减少高数量顶点动画的储存所占容量。
首先,使用量化。例如,位置和纹理坐标使用每个坐标的16位整数存储
进行空间和时间预测并编码差异。例如,如果某个顶点通过增量矢量从frame n - 1移动到frame n,则很可能以与frame n + 1相似的量移动。这些技术大大减少了存储量,因此该系统可以用于实时流数据。
4.7 投影(Projections)
4.7.1 正交投影(Orthographic Projection)


4.7.2 透视投影(Perspective Projection)

透视投影还有一个特性,即计算出的深度值不会随输入pz值线性变化,具体见下图
简单来说,在near与far中间的点,经过投影,会被“推向”相对远处。
