一.OpenCV中的类定义
KalmanFilter类的定义
class CV_EXPORTS_W KalmanFilter
{
public:
CV_WRAP KalmanFilter(); //构造默认KalmanFilter对象
CV_WRAP KalmanFilter(int dynamParams, int measureParams, int controlParams=0, int type=CV_32F); //完整构造KalmanFilter对象方法
void init(int dynamParams, int measureParams, int controlParams=0, int type=CV_32F); //初始化KalmanFilter对象,会替换原来的KF对象
CV_WRAP const Mat& predict(const Mat& control=Mat()); //计算预测的状态值
CV_WRAP const Mat& correct(const Mat& measurement); //根据测量值更新状态值
Mat statePre; //预测值 (x'(k)): x(k)=A*x(k-1)+B*u(k)
Mat statePost; //状态值 (x(k)): x(k)=x'(k)+K(k)*(z(k)-H*x'(k))
Mat transitionMatrix; //状态转移矩阵 (A)
Mat controlMatrix; //控制矩阵 B
Mat measurementMatrix; //测量矩阵 H
Mat processNoiseCov; //系统误差 Q
Mat measurementNoiseCov; //测量误差 R
Mat errorCovPre; //最小均方误差 (P'(k)): P'(k)=A*P(k-1)*At + Q)
Mat gain; //卡尔曼增益 (K(k)): K(k)=P'(k)*Ht*inv(H*P'(k)*Ht+R)
Mat errorCovPost; //修正的最小均方误差 (P(k)): P(k)=(I-K(k)*H)*P'(k)
// 临时矩阵
Mat temp1;
Mat temp2;
Mat temp3;
Mat temp4;
Mat temp5;
};
相关函数的实现方法,即opencv/modules/video/src/kalman.cpp
#include "precomp.hpp"
namespace cv
{
KalmanFilter::KalmanFilter() {}
KalmanFilter::KalmanFilter(int dynamParams, int measureParams, int controlParams, int type)
{
init(dynamParams, measureParams, controlParams, type);
}
void KalmanFilter::init(int DP, int MP, int CP, int type)
{
CV_Assert( DP > 0 && MP > 0 );
CV_Assert( type == CV_32F || type == CV_64F );
CP = std::max(CP, 0);
statePre = Mat::zeros(DP, 1, type); //预测值 x(k)=A*x(k-1)+B*u(k)
statePost = Mat::zeros(DP, 1, type); //修正的状态值 x(k)=x'(k)+K(k)*(z(k)-H*x'(k))
transitionMatrix = Mat::eye(DP, DP, type); //状态转移矩阵
processNoiseCov = Mat::eye(DP, DP, type); //系统误差Q
measurementMatrix = Mat::zeros(MP, DP, type); //测量矩阵
measurementNoiseCov = Mat::eye(MP, MP, type); //测量误差
errorCovPre = Mat::zeros(DP, DP, type); //最小均方误差 (P'(k)): P'(k)=A*P(k-1)*At + Q)
errorCovPost = Mat::zeros(DP, DP, type); //修正的最小均方误差 (P(k)): P(k)=(I-K(k)*H)*P'(k)
gain = Mat::zeros(DP, MP, type); //卡尔曼增益
if( CP > 0 )
controlMatrix = Mat::zeros(DP, CP, type); //控制矩阵
else
controlMatrix.release();
temp1.create(DP, DP, type);
temp2.create(MP, DP, type);
temp3.create(MP, MP, type);
temp4.create(MP, DP, type);
temp5.create(MP, 1, type);
}
const Mat& KalmanFilter::predict(const Mat& control)
{
CV_INSTRUMENT_REGION();
// update the state: x'(k) = A*x(k)
statePre = transitionMatrix*statePost;
if( !control.empty() )
// x'(k) = x'(k) + B*u(k)
statePre += controlMatrix*control;
// update error covariance matrices: temp1 = A*P(k)
temp1 = transitionMatrix*errorCovPost;
// P'(k) = temp1*At + Q
gemm(temp1, transitionMatrix, 1, processNoiseCov, 1, errorCovPre, GEMM_2_T);//GEMM_2_T表示对第2个参数转置。
// handle the case when there will be measurement before the next predict.
statePre.copyTo(statePost);
errorCovPre.copyTo(errorCovPost);
return statePre;
}
const Mat& KalmanFilter::correct(const Mat& measurement)
{
CV_INSTRUMENT_REGION();
// temp2 = H*P'(k)
temp2 = measurementMatrix * errorCovPre;
// temp3 = temp2*Ht + R
gemm(temp2, measurementMatrix, 1, measurementNoiseCov, 1, temp3, GEMM_2_T);//计算测量协方差
// temp4 = inv(temp3)*temp2 = Kt(k)
solve(temp3, temp2, temp4, DECOMP_SVD);//solve函数,用来解线性方程 temp3*temp4=temp2
// K(k)
gain = temp4.t();
// temp5 = z(k) - H*x'(k)
temp5 = measurement - measurementMatrix*statePre; //测量误差
// x(k) = x'(k) + K(k)*temp5
statePost = statePre + gain*temp5;
// P(k) = P'(k) - K(k)*temp2
errorCovPost = errorCovPre - gain*temp2;
return statePost;
}
}
二.需要说明的地方
卡尔曼滤波的相关公式就不贴出来了,上面的更新与预测函数可以对照着那些公式,下面对几个关键的地方进行说明。
(1)gemm()函数
gemm( )是矩阵的广义乘法
void gemm(const GpuMat& src1, constGpuMat& src2, double alpha, const GpuMat& src3, double beta,GpuMat& dst, int flags=0, Stream& stream=Stream::Null())
对应着:
dst = alpha*src1*src2 +beta* src3
需要注意的一点是,程序里面给出了最后一个参数是GEMM_2_T表示对第2个参数转置。
(2)solve()函数
bool solve(InputArray src1, InputArray src2, OutputArray dst, int flags=DECOMP_LU)
用来解线性方程 A*X=B,src1 线性系统的左侧(相当于上面的A),src2 线性系统的右侧(相当于上面的B),dst 输出的解决方案(相当于要求解的X),flag为使用的方法。
(3)为什么可以用solve()函数求解卡尔曼增益
卡尔曼增益K的意义是使后验估计误差协方差最小,将K带入后验估计误差协方差的表达式,

通过求导,可以计算出最优的K值。一般的表达式:
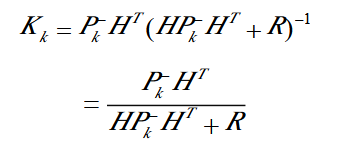
采用SOLVE()函数的依据就是上面的红线部分,相当于直接进行线性方程的求解。
具体推导可以参考:
https://wenku.baidu.com/view/a5a6068619e8b8f67c1cb98b.html
(4)一个典型的例子-- 跟踪鼠标位置
#include "opencv2/video/tracking.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <stdio.h>
using namespace cv;
using namespace std;
const int winHeight=600;
const int winWidth=800;
Point mousePosition= Point(winWidth>>1,winHeight>>1);
//mouse event callback
void mouseEvent(int event, int x, int y, int flags, void *param )
{
if (event==CV_EVENT_MOUSEMOVE) {
mousePosition = Point(x,y);
}
}
int main (void)
{
RNG rng;
//1.kalman filter setup
const int stateNum=4; //状态值4×1向量(x,y,△x,△y)
const int measureNum=2; //测量值2×1向量(x,y)
KalmanFilter KF(stateNum, measureNum, 0);
KF.transitionMatrix = *(Mat_<float>(4, 4) <<1,0,1,0,0,1,0,1,0,0,1,0,0,0,0,1); //转移矩阵A
setIdentity(KF.measurementMatrix); //测量矩阵H
setIdentity(KF.processNoiseCov, Scalar::all(1e-5)); //系统噪声方差矩阵Q
setIdentity(KF.measurementNoiseCov, Scalar::all(1e-1)); //测量噪声方差矩阵R
setIdentity(KF.errorCovPost, Scalar::all(1)); //后验错误估计协方差矩阵P
rng.fill(KF.statePost,RNG::UNIFORM,0,winHeight>winWidth?winWidth:winHeight); //初始状态值x(0)
Mat measurement = Mat::zeros(measureNum, 1, CV_32F); //初始测量值x'(0),因为后面要更新这个值,所以必须先定义
namedWindow("kalman");
setMouseCallback("kalman",mouseEvent);
Mat image(winHeight,winWidth,CV_8UC3,Scalar(0));
while (1)
{
//2.kalman prediction
Mat prediction = KF.predict();
Point predict_pt = Point(prediction.at<float>(0),prediction.at<float>(1) ); //预测值(x',y')
//3.update measurement
measurement.at<float>(0) = (float)mousePosition.x;
measurement.at<float>(1) = (float)mousePosition.y;
//4.update
KF.correct(measurement);
//draw
image.setTo(Scalar(255,255,255,0));
circle(image,predict_pt,5,Scalar(0,255,0),3); //predicted point with green
circle(image,mousePosition,5,Scalar(255,0,0),3); //current position with red
char buf[256];
sprintf_s(buf,256,"predicted position:(%3d,%3d)",predict_pt.x,predict_pt.y);
putText(image,buf,Point(10,30),CV_FONT_HERSHEY_SCRIPT_COMPLEX,1,Scalar(0,0,0),1,8);
sprintf_s(buf,256,"current position :(%3d,%3d)",mousePosition.x,mousePosition.y);
putText(image,buf,cvPoint(10,60),CV_FONT_HERSHEY_SCRIPT_COMPLEX,1,Scalar(0,0,0),1,8);
imshow("kalman", image);
int key=waitKey(3);
if (key==27){//esc
break;
}
}
}
其他例子可以参考:
https://blog.csdn.net/haima1998/article/details/80641628
