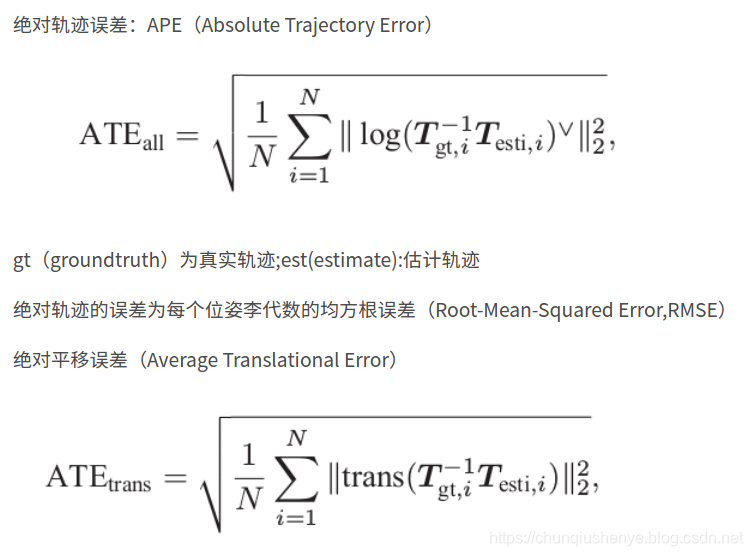
绝对轨迹误差直接计算相机位姿的真实值与SLAM系统的估计值之间的差,程序首先根据位姿的时间戳将真实值和估计值进行对齐, 然后计算每对位姿之间的差值, 并最终以图表的形
式输出, 该标准非常适合于评估视觉 SLAM 系统的性能。
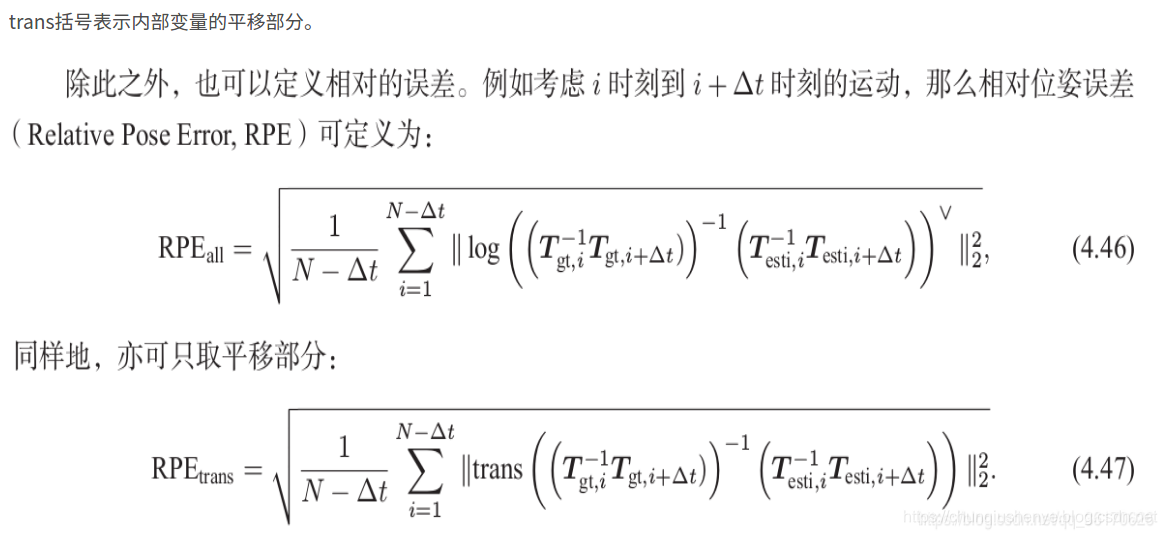
相对位姿误差用于计算相同两个时间戳上的位姿变化量的差, 同样, 在用时间戳对齐之后, 真实位姿和估计位姿均每隔一段相同时间计算位姿的变化量, 然后对该变化量做差, 以获得相对位姿误差, 该标准适合于估计系统的漂移。
两种突出的方法是绝对轨迹误差(ATE)和相对姿态误差(RPE)。
ATE适合评估视觉SLAM系统的性能。 相比之下,RPE适合评估视觉里程计的漂移量,例如每秒的漂移量。
evaluate_ate.py
绝对轨迹误差脚本直接测量真实轨迹和估计轨迹的点之间的差异。
作为预处理步骤,我们使用时间戳将估计的姿势与地面真实姿势相关联。 基于此关联,我们使用奇异值分解来对齐真实轨迹和估计轨迹。
最后,我们计算每对姿势之间的差异,并输出这些差异的均值/中值/标准差。
此外,脚本还可以将两个轨迹绘制到png或pdf文件,这样一来可以更加直观的看到差异。