evo安装与使用
1、evo安装
evo共有两种安装方式
1、快捷安装 ,直接安装最新的稳定发行版:
pip install evo --upgrade --no-binary evo2、源码安装 ,下载源码进行安装:
首先在任意文件夹下下载evo,也可以在home中直接下载
git clone https://github.com/MichaelGrupp/evo.git然后进入evo文件夹下打开终端运行:
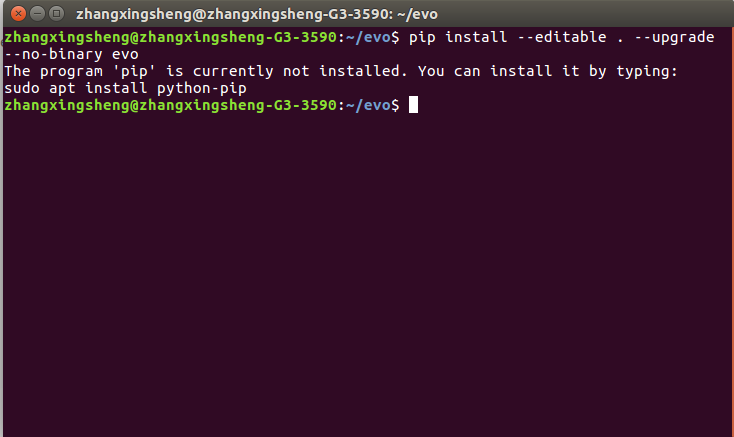
pip install --editable . --upgrade --no-binary evo这里我使用的是第二种方式的安装,其中遇到的一些问题记录如下:
问题1:git clone下载超时
使用git clone下载evo文件时遇到超时的情况,可以直接从网址进入:
https://github.com/MichaelGrupp/evo然后直接下载。

问题2:运行pip安装命令显示pip未安装
这里可以通过直接运行下列命令安装:
sudoaptinstall python-pip注意:pip是对应于python2版本的命令,python运行的是pip3
问题3:pip版本偏低
在安装完pip后,再次运行上述安装命令遇到下述问题:

错误显示为我安装的pip版本低于要求的版本,下面给出了建议方式进行更新。但是我运行下面安装命令:
pip install --upgrade pip遇到了下面的情况:
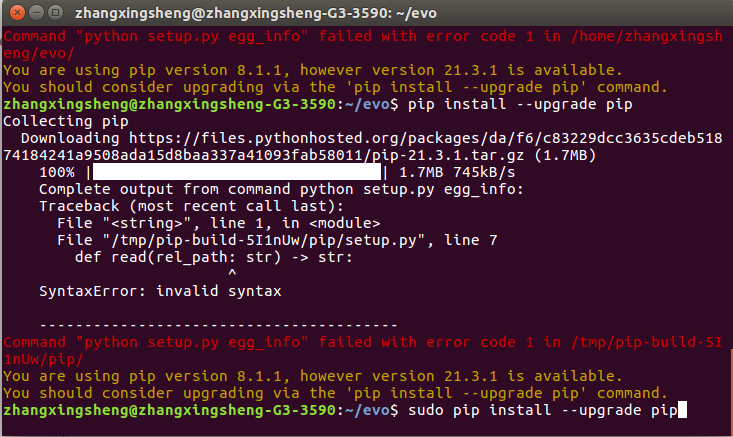
结果并没有什么卵用???疯狂百度找了半天最后终于找到解决方案:
采用手动安装方式:
sudoapt-get update
sudoapt-get upgrade
wget https://bootstrap.pypa.io/get-pip.py
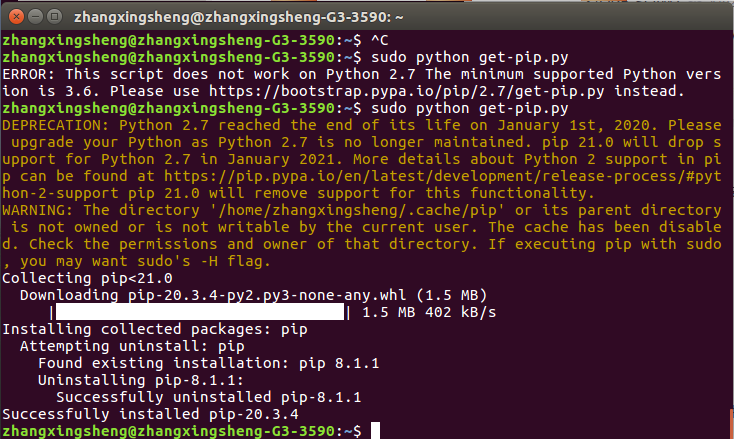
sudo python get-pip.py
pip --version这个方式是来自ykwjt的博客,但是我运行的时候出现了一定的问题:
zhangxingsheng@zhangxingsheng-G3-3590:~$ sudo python get-pip.py
ERROR: This script does not work on Python 2.7 The minimum supported Python version is 3.6. Please use https://bootstrap.pypa.io/pip/2.7/get-pip.py instead.这里是上面第三步中网址下载的文件版本的问题,将其删除然后修改为下面这个网址下的文件然后重新运行第四步即可:
问题4、再次运行安装命令,显示安装成功但是有两个报错:
这里安装完成后显示了两个东西的版本问题:
ERROR: pip's legacy dependency resolver does not consider dependency conflicts when selecting packages. This behaviour is the source of the following dependency conflicts.
pandas 0.24.2 requires numpy>=1.12.0, but you'll have numpy 1.11.0 which is incompatible.
seaborn 0.9.1 requires matplotlib>=1.5.3, but you'll have matplotlib 1.5.1 which is incompatible.
Successfully installed argcomplete-1.12.3 colorama-0.4.4 configparser-4.0.2 contextlib2-0.6.0.post1 evo-1.12.0 importlib-metadata-2.1.1 natsort-6.2.1 pandas-0.24.2 pathlib2-2.3.6 python-dateutil-2.8.2 scandir-1.10.0 scipy-1.2.3 seaborn-0.9.1 zipp-1.2.0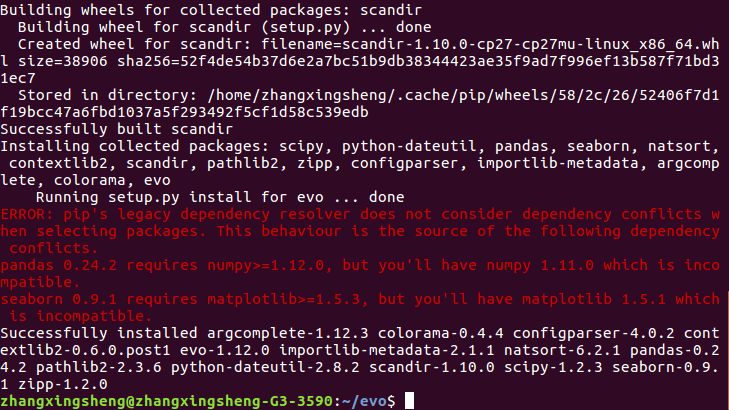
这里是由于numpy和matplotlib的版本过低导致的报错,运行下列命令升级这两个工具:
pip install numpy --upgrade --user
pip install matplotlib --upgrade --user2、evo测试
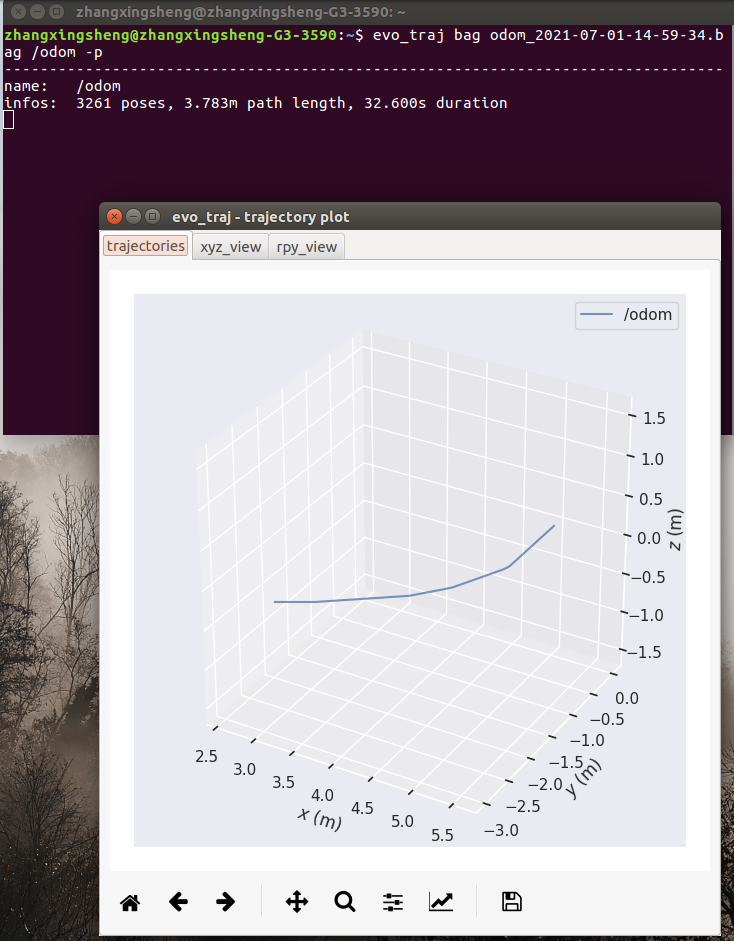
evo共支持kitti、tum、euroc这三个公开数据集格式,同时也支持bag文件里的topic。这里使用一个bag文件的轨迹测试一下:
evo_traj 的具体语法格式:
evo_traj bag文件 话题名1 话题名2 .... 话题名n [参数]运行命令如下:
evo_traj bag odom_20201-07-01-14-59-34.bag /odom -p效果如下:
参考文档:
1、
https://blog.csdn.net/weixin_44386661/article/details/1030805512、
https://blog.csdn.net/ykwjt/article/details/1058460713、
https://blog.csdn.net/A_L_A_N/article/details/88708979?spm=1001.2101.3001.6650.1&utm_medium=distribute.pc_relevant.none-task-blog-2~default~CTRLIST~default-1.no_search_link&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2~default~CTRLIST~default-1.no_search_link4、
https://blog.csdn.net/qq_43247439/article/details/1128021045、
https://blog.csdn.net/qq_39779233/article/details/1075820596、
https://zhuanlan.zhihu.com/p/882231067、
https://blog.csdn.net/hhaowang/article/details/105226136版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
本文链接:https://blog.csdn.net/YiYeZhiNian/article/details/120941694
Post navigation
在虚拟机中对阿克曼转向车进行导航及避障的仿真测试-爱代码爱编程
一种slam精度评定工具——evo使用方法详解-爱代码爱编程
2019-10-09 分类: SLAM 视觉 evo 精度评定
evo工具github链接:link evo_ape 计算绝对位姿误差 绝对位姿误差,常被用作绝对轨迹误差,比较估计轨迹和参考轨迹并计算整个轨迹的统计数据,适用于测试轨迹的全局一致性。 命令语法:命令 格式 参考轨迹 估
测评工具evo安装与使用-爱代码爱编程
2019-11-15 分类: SLAM 建图与重定位 slam测评 测评
slam测评工具——evo的安装及使用 evo简介evo安装常见问题evo使用**几个常用的evo工具为:**evo_traj:直接画出轨迹evo_ape:绝对位姿误差的计算evo_rpe:相对位姿误差的计算其他参数 evo简介 evo是一个很好的测评工具,它可以根据时间戳将轨迹进行对齐,同时可以将不同尺度的轨迹按照你指定的标准轨迹进行拉伸对
evo测评工具的安装使用和常见问题-爱代码爱编程
2019-12-04 标签: 文件格式分类: VSLAM evo tum
Ubuntu16.04 evo的安装与使用教程 一. 安装 1.安装&&升级numpy sudo pip install numpy -I 2.检查user权限 sudo pip install . --user --upgrade 3.pip安装evo pip install . --upgrade --no-binary
evo安装、evo使用方法详细介绍使用教程,SLAM轨迹精度评估工具,如何用来评估ORB-SLAM2生成的轨迹精度,评估激光雷达SLAM与视觉SLAM的轨迹精度,量化SLAM的误差-爱代码爱编程
2020-03-01 标签: linux ubuntu分类: SLAM 常用工具 3d成像
evo在视觉SLAM中是一个极为有用的工具,对于论文党、科研党、工程党都非常有帮助,它可以用于评估SLAM输出的轨迹的精度,可以自动生成均值、方差、轨迹等等信息的图或者表,总之评估SLAM精度用它足以。 它目前支持的公开数据集格式有:“TUM”、“KITTI”、“EuRoC MAV"以及"ROS bagfile”。如果你使用的数据集格式为这些中的
EVO的安装-爱代码爱编程
2020-04-29 分类: SLAM ubuntu下安装包安装
初步学习可以根据下面的链接找到更多资源:官方地址 用evo工具评估SLAM轨迹 第一步:终端输入: pip install evo --upgrade --no-binary evo 报错: Collecting evo Downloading https://files.pythonhosted.org/packages/d2/01/1f
EVO评估工具使用技巧-爱代码爱编程
2020-08-18 分类: slam实验
EVO评估工具使用技巧 在SLAM的轨迹对比中,EVO是一个非常好的工具。参考博客:【博客】、【ROS map】以及【博客】 安装 基本使用 以上网上都有很多介绍的,在此不再赘述。 常忽略的一些小技巧 1.直接在~/.evo/文件夹下的settings.json文件中设置各种默认参数: 其中包括线宽、背景、尺寸等。 2.灵活应用-a、-s、-
关于jupyter notebook使用过程中的一些排错-爱代码爱编程
2020-11-21 标签: python 深度学习 kernel分类: 深度学习
关于jupyter notebook使用过程中的一些排错 1:使用jupyter notebook不能中断正在运行的程序 解决办法:打开conda Promet进入自己的环境,输入pip3 install --upgrade --force-reinstall --no-cache-dir jupyter这句话,在运行这句话的过程中可能会出现这样的报错信
ERROR: pip‘s dependency resolver does not currently take into account all the packages that are inst-爱代码爱编程
安装包的时候出现报错:ERROR: pip’s dependency resolver does not currently take into account all the packages that are installed. This behaviour is the source of the following dependency conf
evo安装,使用及报错处理-爱代码爱编程
2021-05-04 分类: 工具 SLAM python evo
evo安装,使用及报错处理 本人(ubuntu18.04)最近从事视觉slam研究,需要使用evo评估轨迹。记录一下踩过的一些坑,供大家交流参考。 evo安装 事先声明,evo需要python版本3.6+或者py2.7 1.12.0。 安装依赖: sudo apt-get install libfreetype6-dev gfortran sud
ubuntu16.04 mobsf 配置指南-爱代码爱编程
2021-08-02 分类: 安全开发
一、安装需要内容 (1) 安装必要文件 sudo apt update sudo apt install software-properties-common sudo add-apt-repository ppa:deadsnakes/ppa sudo apt install python3.8 python3.8-venv (2)配置 pyt