首先介绍一下Pulse Sensor
PulseSensor 脉搏传感器介绍
基本参数
| 供电电压: | 3.3~5V |
|---|---|
| 检测信号类型: | 光反射信号(PPG) |
| 输出信号类型: | 模拟信号 |
| 输出信号大小: | 0~VCC |
| 电流大小: | ~4ma(5v 下) |
功能原理
PulseSensor 是一款用于脉搏心率测量的光电反射式模拟传感器。将其佩戴于手指、耳垂等处,利用人体组织在血管搏动时造成透光率不同来进行脉搏测量。传感器对光电信号进行滤波、放大,最终输出模拟电压值。单片机通过将采集到的模拟信号值转换为数字信号,再通过简单计算就可以得到心率数值。
PulseSensor 是一款开源硬件,目前国外官网上已有其对应的开源 arduino 程序和上位机 Processing 程序,其适用于心率方面的科学研究和教学演示,也非常适合用于二次开发。 网上关于传感器的 arduino 资料已经十分丰富(毕竟同为开源硬件),本文采用 STM32F407系列芯片 的 ADC 模块读取并处理传感器数据,实现心率测量。
引脚定义
传感器只有三个引脚,分别为信号输出 S 脚 、电源正极 VCC 以及电源负极 GND,供电电压为 3.3V - 5V,可通过杜邦线与开发板连接。上电后, 传感器会不断从 S 脚输出采集到的电压模拟值。需要注意的是,印有心形的一面才是与手指接触面,在测量时要避免接触布满元件的另一面,否则会影响信号准确性。
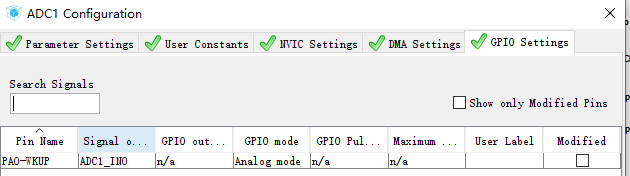
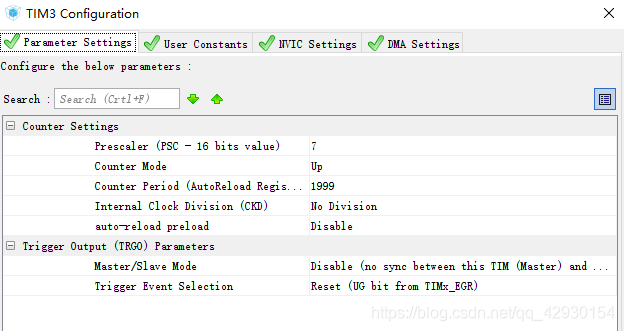
Cube配置



生成代码
完善代码
main.C里边完成
1、/* USER CODE BEGIN Includes */和/* USER CODE END Includes */中间添加
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */2、/* USER CODE BEGIN PV */和/* USER CODE END PV */中间添加
/* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/
//==============心率============================
// these variables are volatile because they are used during the interrupt service routine!
#define true 1
#define false 0
int BPM; // used to hold the pulse rate
int Signal; // holds the incoming raw data
int IBI = 600; // holds the time between beats, must be seeded!
unsigned char Pulse = false; // true when pulse wave is high, false when it's low
unsigned char QS = false; // becomes true when Arduoino finds a beat.
int rate[10]; // array to hold last ten IBI values
unsigned long sampleCounter = 0; // used to determine pulse timing
unsigned long lastBeatTime = 0; // used to find IBI
int P =512; // used to find peak in pulse wave, seeded
int T = 512; // used to find trough in pulse wave, seeded
int thresh = 512; // used to find instant moment of heart beat, seeded
int amp = 100; // used to hold amplitude of pulse waveform, seeded
int Num;
unsigned char firstBeat = true; // used to seed rate array so we startup with reasonable BPM
unsigned char secondBeat = false; // used to seed rate array so we startup with reasonable BPM
//===============心率完成=========================
/* USER CODE END PV */3、/* USER CODE BEGIN PFP */和/* USER CODE END PFP */中间添加
/* USER CODE BEGIN PFP */
/* Private function prototypes -----------------------------------------------*/
void sendDataToProcessing(char symbol, int dat );
#ifdef __GNUC__
/* With GCC/RAISONANCE, small printf (option LD Linker->Libraries->Small printf
set to 'Yes') calls __io_putchar() */
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif /* __GNUC__ */
/* USER CODE END PFP */4、 /* USER CODE BEGIN 2 */和 /* USER CODE END 2 */中间添加
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim3);
/* USER CODE END 2 */5、
/* USER CODE BEGIN WHILE */和 /* USER CODE END WHILE */中间添加
/* USER CODE BEGIN WHILE */
while (1)
{
sendDataToProcessing('S', Signal); // send Processing the raw Pulse Sensor data
if (QS == true)
{
sendDataToProcessing('B',BPM); // send heart rate with a 'B' prefix
sendDataToProcessing('Q',IBI); // send time between beats with a 'Q' prefix
QS = false; // reset the Quantified Self flag for next time
}
HAL_Delay(20); //delay for 20ms
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}6、
/* USER CODE BEGIN 4 */和/* USER CODE END 4 */中间添加/*
/* USER CODE BEGIN 4 */
PUTCHAR_PROTOTYPE
{
/* Place your implementation of fputc here */
/* e.g. write a character to the EVAL_COM1 and Loop until the end of transmission */
HAL_UART_Transmit(&huart2, (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
unsigned int runningTotal;
if(htim->Instance==htim3.Instance)
{
Signal=HAL_ADC_GetValue(&hadc1)>>2; // read the Pulse Senso
sampleCounter += 2; // keep track of the time in mS with this variable
Num = sampleCounter - lastBeatTime; // monitor the time since the last beat to avoid noise
HAL_ADC_Start(&hadc1); //restart ADC conversion
// find the peak and trough of the pulse wave
if(Signal < thresh && Num > (IBI/5)*3){ // avoid dichrotic noise by waiting 3/5 of last IBI
if (Signal < T){ // T is the trough
T = Signal; // keep track of lowest point in pulse wave
}
}
if(Signal > thresh && Signal > P){ // thresh condition helps avoid noise
P = Signal; // P is the peak
} // keep track of highest point in pulse wave
// NOW IT'S TIME TO LOOK FOR THE HEART BEAT
// signal surges up in value every time there is a pulse
if (Num > 250){ // avoid high frequency noise
if ( (Signal > thresh) && (Pulse == false) && (Num > (IBI/5)*3) ){
Pulse = true; // set the Pulse flag when we think there is a pulse
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_SET); // turn on pin 13 LED
IBI = sampleCounter - lastBeatTime; // measure time between beats in mS
lastBeatTime = sampleCounter; // keep track of time for next pulse
if(secondBeat){ // if this is the second beat, if secondBeat == TRUE
secondBeat = false; // clear secondBeat flag
for(int i=0; i<=9; i++){ // seed the running total to get a realisitic BPM at startup
rate[i] = IBI;
}
}
if(firstBeat){ // if it's the first time we found a beat, if firstBeat == TRUE
firstBeat = false; // clear firstBeat flag
secondBeat = true; // set the second beat flag
// sei(); // enable interrupts again
return; // IBI value is unreliable so discard it
}
// keep a running total of the last 10 IBI values
runningTotal = 0; // clear the runningTotal variable
for(int i=0; i<=8; i++){ // shift data in the rate array
rate[i] = rate[i+1]; // and drop the oldest IBI value
runningTotal += rate[i]; // add up the 9 oldest IBI values
}
rate[9] = IBI; // add the latest IBI to the rate array
runningTotal += rate[9]; // add the latest IBI to runningTotal
runningTotal /= 10; // average the last 10 IBI values
BPM = 60000/runningTotal; // how many beats can fit into a minute? that's BPM!
QS = true; // set Quantified Self flag
// QS FLAG IS NOT CLEARED INSIDE THIS ISR
}
}
if (Signal < thresh && Pulse == true){ // when the values are going down, the beat is over
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_RESET); // turn off pin 13 LED
Pulse = false; // reset the Pulse flag so we can do it again
amp = P - T; // get amplitude of the pulse wave
thresh = amp/2 + T; // set thresh at 50% of the amplitude
P = thresh; // reset these for next time
T = thresh;
}
if (Num > 2500){ // if 2.5 seconds go by without a beat
thresh = 512; // set thresh default
P = 512; // set P default
T = 512; // set T default
lastBeatTime = sampleCounter; // bring the lastBeatTime up to date
firstBeat = true; // set these to avoid noise
secondBeat = false; // when we get the heartbeat back
}
}
}
void sendDataToProcessing(char symbol, int dat )
{
putchar(symbol); // symbol prefix tells Processing what type of data is coming
printf("%d\r\n",dat); // the data to send culminating in a carriage return
}
/* USER CODE END 4 *///顺利完成 Pulse Senso传感器移植 在此记录供以后查看
最后附粘贴一个别人的心率算法
读取传感器电压值 —— STM32 ADC 功能配置
硬件配置
开发板使用的是公司的 M4 板子,传感器 3.3V 供电,信号采集选用 ADC1 的 通道 2,硬件连接如下:
| 开发板 | 传感器 |
|---|---|
| PA2 | S |
| 3V3 | + |
| GND | - |
把 PA2 用作模拟功能,配置 ADC 为 12 位分辨率,单次转换,并设置转换序列长度为 1,首次转换通道 2。为确保数据准确性,选择APB2 时钟 6 分频作为 ADC 时钟(即 84M / 6 = 14M),采样时间 480 个周期(使得采样时间更加充分),最后使能 ADC。初始化函数如下:
ADC。初始化函数如下:
/******************** ADC通道2初始化函数 ************************/void ADC_AN2_Init(void){
/* 设置ADC功能对应的GPIO端口 */
RCC->AHB1ENR |= 1 << 0;
GPIOA->MODER &= ~(3 << (2 * 2));
GPIOA->MODER |= 3 << (2 * 2);
/* 配置ADC采样模式 */
RCC->APB2ENR |= 1 << 8; //使能ADC模块时钟 ADC1->CR1 &= ~(3 << 24); //12位分辨率 ADC1->CR1 &= ~(1 << 8); //非扫描模式 ADC1->CR2 &= ~(3 << 28); //禁止外部触发 ADC1->CR2 &= ~(1 << 11); //右对齐 ADC1->CR2 &= ~(1 << 1); //单次转换 ADC->CCR &= ~(3 << 16);
ADC->CCR |= 2 << 16; //6分频 ADC1->SMPR2 &= ~(0x07 << 6);
ADC1->SMPR2 |= 0x07 << 6; //480采样周期 ADC1->SQR1 &= ~(0x0f << 20); //1次转换 ADC1->SQR3 &= ~(0x1f << 0);
ADC1->SQR3 |= 0x02 << 0; //转换的通道为通道2
/* 使能ADC */
ADC1->CR2 |= 1 << 0; //开启ADC}编写好初始化函数后还需要写一个进行 AD 转换的函数,这也是我们功能的核心。思路是通过将十次 AD 转换值进行冒泡排序,然后掐头去尾求平均值作为最后的转换输出值,程序如下:
/******************** ADC通道2转换函数 ************************/u16 Get_ADC_1_CH2(void){
u8 i,j;
u16 buff[10] = {0};
u16 temp;
for(i = 0; i < 10; i ++)
{
/* 开始转换 */
ADC1->CR2 |= 1 << 30;
/* 等待转换结束 */
while( !(ADC1->SR & (1 << 1)) )
{
/* 等待转换接收 */
}
buff[i] = ADC1->DR; //读取转换结果 }
/* 把读取值的数据按从小到大的排列 */
for(i = 0; i < 9; i++)
{
for(j = 0 ; j < 9-i; j++)
{
if(buff[j] > buff[j+1])
{
temp = buff[j];
buff[j] = buff[j+1];
buff[j+1] = temp;
}
}
}
/* 求平均值 */
temp = 0;
for(i = 1; i < 9; i++)
{
temp += buff[i];
}
return temp/8;}串口打印,验证数据读取
是驴是马得拉出来溜溜,配好的 ADC 能不能用也要经过检验。方法是把从传感器读到的转换值在串口打印,以此测试 ADC 转换是否工作正常。为了模拟波形的效果,编写如下波形打印函数 —— 将读出来的数据缩小适当倍数后,用同一行的星号数量来表示。
void Print_Wave(void){
int temp, i;
temp = Get_ADC_1_CH2() / 20; // 缩小一个倍数
for (i = 0; i < temp; i++)
printf("*");
printf ("\r\n");}在主函数的 while (1) 循环中不断调用 Print_Wave() 函数在串口打印输出,每次打印延时一段时间,代码如下:
int main(void){
Usrat_1_Init(84,115200,0);
Timer_6_Init();
ADC_AN2_Init();
while(1)
{
Print_Wave();
Timer_6_Delay_ms(5); // 延时 5 ms }}把开发板连接电脑,下载程序后打开串口工具接收数据,通过对传感器测量面绿光的遮挡,可在串口看到用字符打印的波形,波峰波谷清晰可见,并不懂波动,证明 ADC 读取到了传感器输出的模拟电压信号。效果如下图:
计算心率值 —— 采样数据处理算法
心率指的是一分钟内的心跳次数,得到心率最笨的方法就是计时一分钟后数有多少次脉搏。但这样的话每次测心率都要等上个一分钟才有一次结果,效率极低。另外一种方法是,测量相邻两次脉搏的时间间隔,再用一分钟除以这个间隔得出心率。这样的好处是可以实时计算脉搏,效率高。由此引出了 IBI 和 BPM 两个值的概念:
IBI: 相邻两次脉搏的时间间隔(单位:ms) BPM(beats per minute):心率,一分钟内的心跳次数
且:BPM = 60 / IBI
从网上找来的 arduino 开源算法复杂的一匹,看了一遍感觉一头雾水(反正我暂时没看懂)。由上面的分析可以得出,我们的最终目的就是要求出 IBI 的值,并通过 IBI 计算出实时心率。既然知道原理了那就自己来把算法实现吧。
核心操作 —— 识别一个脉搏信号
无论是采用计数法还是计时法,只有能识别出一个脉搏,才能数出一分钟内脉搏数或者计算两个相邻脉搏之间的时间间隔。那怎么从采集的电压波形数据判断是不是一个有效的脉搏呢?
显然,可以通过检测波峰来识别脉搏。最简单粗暴的方法是设定一个阈值,当读取到的信号值大于此阈值时便认为检测一个脉搏。似乎用一个 if 语句就轻轻松松解决。但,事情真的有那么简单么?
其实这里存在两个问题。
问题一:阈值的选取
作为判断的参考标尺,阈值该选多大?10?100?还是1000?我们不得而知,因为波形的电压范围是不确定的,振幅有大有小并且会改变,根本不能用一个写死的值去判断。就像下面这张图一样:
可以看出,两个形状相同波形的检测结果截然不同 —— 同样是波峰,在不同振幅的波形中与阈值比较的结果存在差异。实际情况正是如此:传感器输出波形的振幅是在不断随机变化的,想用一个固定的值去判定波峰是不现实的。
既然固定阈值的方法不可取,那自然想到改变阈值 —— 根据信号振幅调整阈值,以适应不同信号的波峰检测。通过对一个周期内的信号多次采样,得出信号的最高与最低电压值,由此算出阈值,再用这个阈值对采集的电压值进行判定,考虑是否为波峰。也就是说电压信号的处理分两步,首先动态计算出参考阈值,然后用用阈值对信号判定、识别一个波峰。
问题二:特征点识别
上面得出的是一段有效波形,而计算 IBI 只需要一个点。需要从一段有效信号上选取一个点,这里暂且把它称为特征点,这个特征点代表了一个有效脉搏,只要能识别到这个特征点,就能在一个脉搏到来时触发任何动作。
通过记录相邻两个特征点的时间并求差值,计算 IBI 便水到渠成。那这个特征点应该取在哪个位置呢,从官网算法说明可以看出,官方开源 arduino 代码的 v1.1 版本是选取信号上升到振幅的一半作为特征点,我们可以捕获这个特征点作为一个有效脉搏的标志,然后计算 IBI。
算法整体框架与代码实现
分析得出算法的整体框架如下:
-
缓存一个波形周期内的多次采样值,求出最大最小值,计算出振幅中间值作为信号判定阈值
-
通过把当前采样值和上一采样值与阈值作比较,寻找到「信号上升到振幅中间位置」的特征点,记录当前时间
-
寻找下一个特征点并记录时间,算出两个点的时间差值,即相邻两次脉搏的时间间隔 IBI
-
由 IBI 计算心率值 BPM
代码如下,程序中使用一个 50 长度的数组进行采样数据缓存,在主函数 while (1) 中以 20ms 的周期不断执行采样、数据处理,其中的条件语句 if (PRE_PULSE == FALSE && PULSE == TRUE) 就表示找到了特征点、识别出一次有效脉搏,串口输出心率计算结果。
int main(void){
Usrat_1_Init(84,115200,0);
Timer_6_Init();
ADC_AN2_Init();
while(1)
{
//Print_Wave();
preReadData = readData; // 保存前一次值 readData = Get_ADC_1_CH2(); // 读取AD转换值
if ((readData - preReadData) < filter) // 滤除突变噪声信号干扰 data[index++] = readData; // 填充缓存数组
if (index >= BUFF_SIZE)
{
index = 0; // 数组填满,从头再填
// 通过缓存数组获取脉冲信号的波峰、波谷值,并计算中间值作为判定参考阈值 max = Get_Array_Max(data, BUFF_SIZE);
min = Get_Array_Min(data, BUFF_SIZE);
mid = (max + min)/2;
filter = (max - min) / 2;
}
PRE_PULSE = PULSE; // 保存当前脉冲状态 PULSE = (readData > mid) ? TRUE : FALSE; // 采样值大于中间值为有效脉冲
if (PRE_PULSE == FALSE && PULSE == TRUE) // 寻找到「信号上升到振幅中间位置」的特征点,检测到一次有效脉搏 {
pulseCount++;
pulseCount %= 2;
if(pulseCount == 1) // 两次脉搏的第一次 {
firstTimeCount = timeCount; // 记录第一次脉搏时间 }
if(pulseCount == 0) // 两次脉搏的第二次 {
secondTimeCount = timeCount; // 记录第二次脉搏时间 timeCount = 0;
if ( (secondTimeCount > firstTimeCount))
{
IBI = (secondTimeCount - firstTimeCount) * SAMPLE_PERIOD; // 计算相邻两次脉搏的时间,得到 IBI BPM = 60000 / IBI; // 通过 IBI 得到心率值 BPM
if (BPM > 200) //限制BPM最高显示值 BPM = 200;
if (BPM < 30) //限制BPM最低显示值 BPM=30;
}
}
printf("SIG = %d IBI = %d, BMP = %d\r\n\r\n", readData, IBI, BPM); // 串口打印调试
// printf("B%d\r\n", BPM); // 上位机B数据发送
// printf("Q%d\r\n", IBI); // 上位机Q数据发送 }
SIG = readData - 1500; // 脉象图数值向下偏移,调整上位机图像
// printf("S%d\r\n", SIG); // 上位机S数据发送
timeCount++; // 时间计数累加 Timer_6_Delay_ms(SAMPLE_PERIOD); // 延时再进行下一周期采样 }}