文章目录
参考博客:
DPM(Deformable Part Model)原理详解
目标检测的图像特征提取之(一)HOG特征
传统目标检测算法
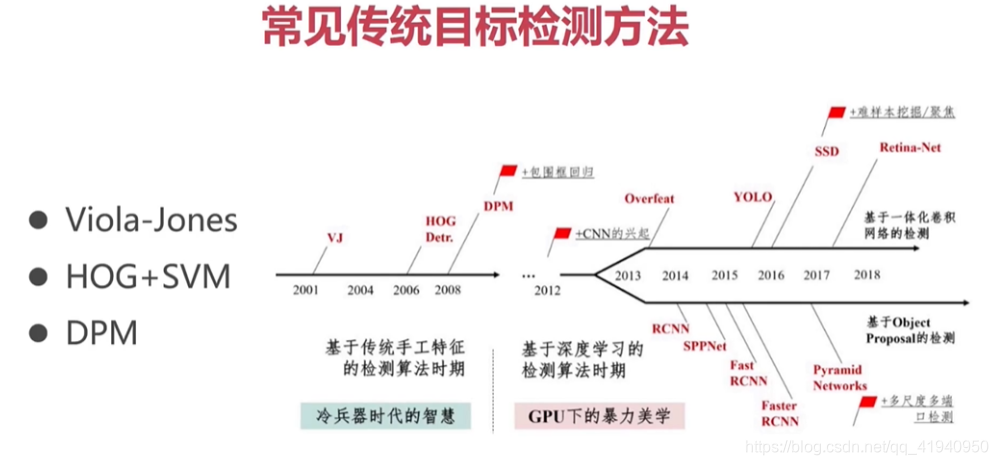
Viola-Jones方法(人脸识别)
opencv内置的人脸识别算法用的就是该算法。
Haar特征抽取
haar特征属于纹理特征的一种,特征提取为
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-67dMvOIN-1577005837806)(C:\Users\Mr.PENG\Documents\目标检测\image\1576996424319.png)]](https://img-blog.csdnimg.cn/20191222171200265.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3FxXzQxOTQwOTUw,size_16,color_FFFFFF,t_70)
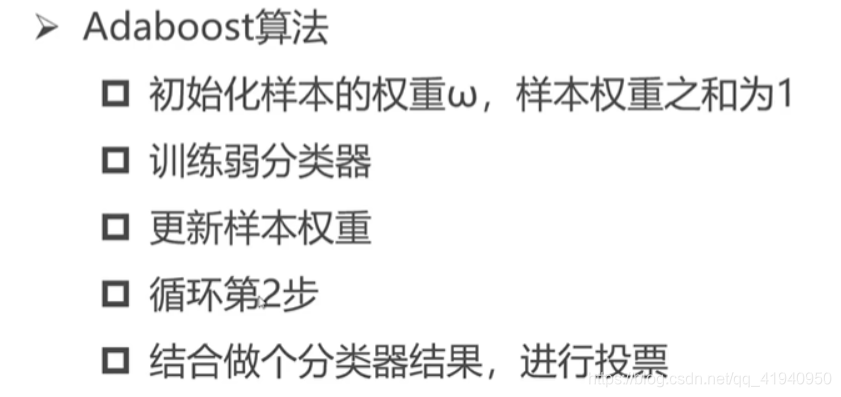
训练人脸识别分类器(adaboost分类器)
多个弱分类器进行集成学习(三个臭皮匠赛过诸葛亮)
滑动窗口
滑动窗口算法有许多需要做优化的地方,比如滑动窗口的大小和步长,因为尺度的变化和步长的变化会导致算法本身就会出现的大量的冗余的候选框,这些冗余的候选框就会造成目标检测算法速度的下降和性能的降低
- 滑动窗口的步长
HOG + SVM (行人检测、opencv实现)
该算法的提出也主要是用于行人检测,该问题的难点也在于行人的姿态变化和行人处在运动状态的识别。
主要过程:

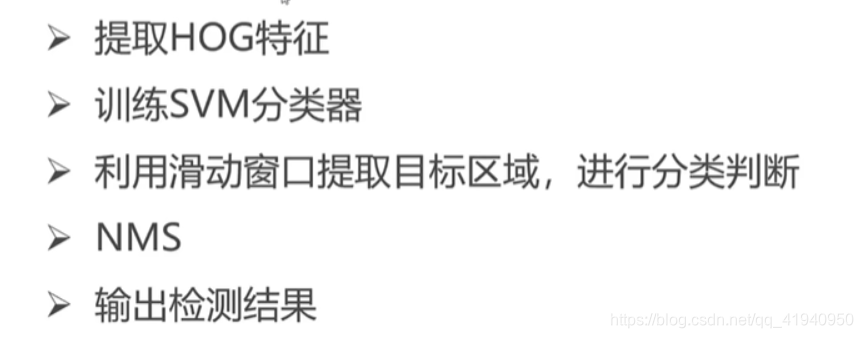
HOG特征
方向梯度直方图(Histogram of Oriented Gradient, HOG)特征是一种在计算机视觉和图像处理中用来进行物体检测的特征描述子。它通过计算和统计图像局部区域的梯度方向直方图来构成特征。
优点
与其他的特征描述方法相比,HOG有很多优点。首先,由于HOG是在图像的局部方格单元上操作,所以它对图像几何的和光学的形变都能保持很好的不变性,这两种形变只会出现在更大的空间领域上。其次,在粗的空域抽样、精细的方向抽样以及较强的局部光学归一化等条件下,只要行人大体上能够保持直立的姿势,可以容许行人有一些细微的肢体动作,这些细微的动作可以被忽略而不影响检测效果。因此HOG特征是特别适合于做图像中的人体检测的。
HOG特征提取算法的主要流程
HOG特征提取方法就是将一个image(你要检测的目标或者扫描窗口):
-
灰度化(将图像看做一个x,y,z(灰度)的三维图像);
-
采用Gamma校正法对输入图像进行颜色空间的标准化(归一化);目的是调节图像的对比度,降低图像局部的阴影和光照变化所造成的影响,同时可以抑制噪音的干扰;
-
计算图像每个像素的梯度(包括大小和方向);主要是为了捕获轮廓信息,同时进一步弱化光照的干扰。
- 最常用的方法是:首先用[-1,0,1]梯度算子对原图像做卷积运算,得到x方向(水平方向,以向右为正方向)的梯度分量gradscalx,然后用[1,0,-1]T梯度算子对原图像做卷积运算,得到y方向(竖直方向,以向上为正方向)的梯度分量gradscaly。然后再用以上公式计算该像素点的梯度大小和方向;
-
将图像划分成小cells(例如6*6像素/cell);
-
统计每个cell的梯度直方图(不同梯度的个数),即可形成每个cell的descriptor;
- 为局部图像区域提供一个编码,同时能够保持对图像中人体对象的姿势和外观的弱敏感性;
-
将每几个cell组成一个block(例如3*3个cell/block),一个block内所有cell的特征descriptor串联起来便得到该block的HOG特征descriptor。
- 由于局部光照的变化以及前景-背景对比度的变化,使得梯度强度的变化范围非常大。这就需要对梯度强度做归一化。归一化能够进一步地对光照、阴影和边缘进行压缩。
-
将图像image内的所有block的HOG特征descriptor串联起来就可以得到该image(你要检测的目标)的HOG特征descriptor了。这个就是最终的可供分类使用的特征向量了。
DPM(物体检测)
基于HOG特征进行优化。
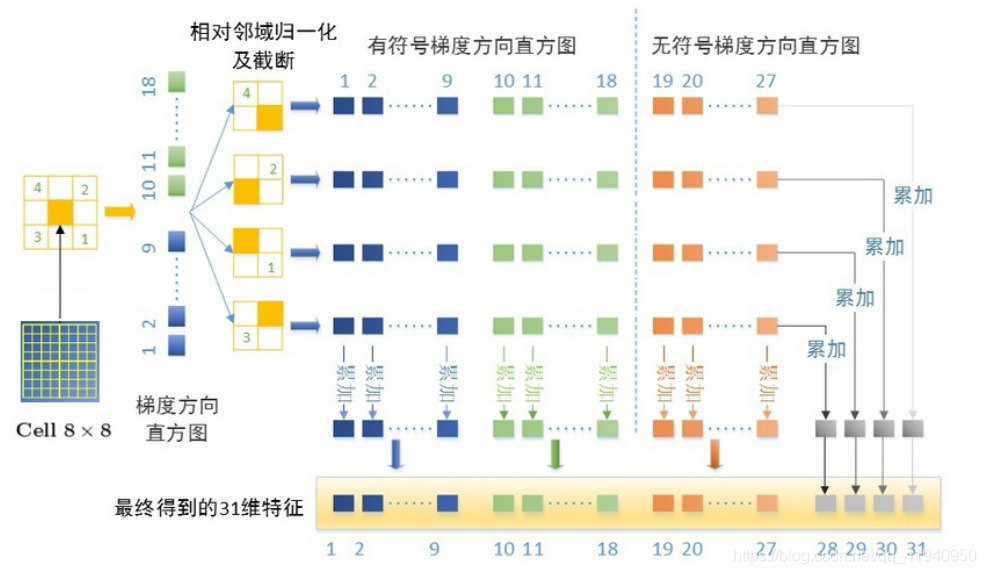
DPM特征提取方法
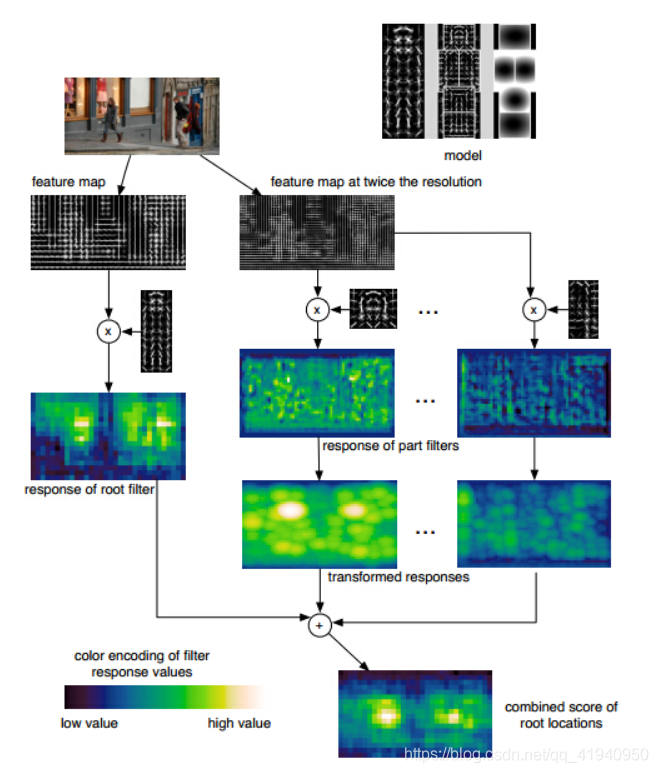
DPM描述子的检测过程
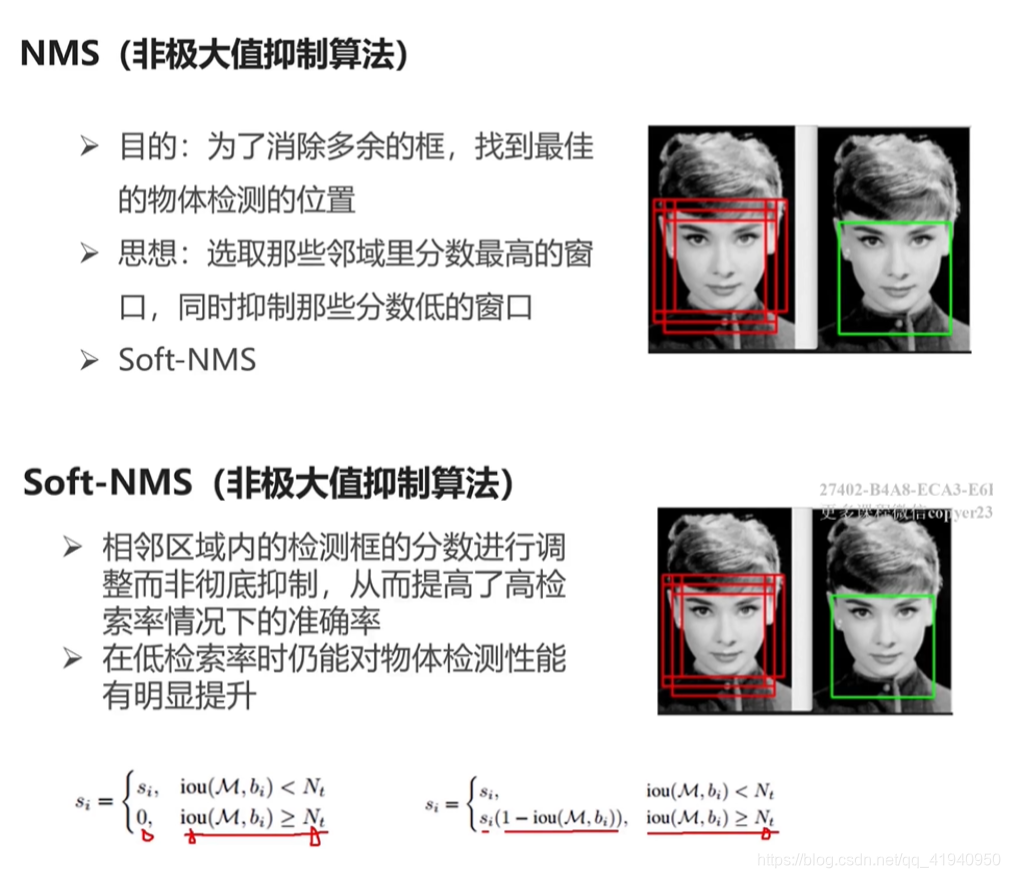
非极大值抑制算法