1.基于滑动窗口的目标检测算法
滑动窗口>>特征提取>>分类器
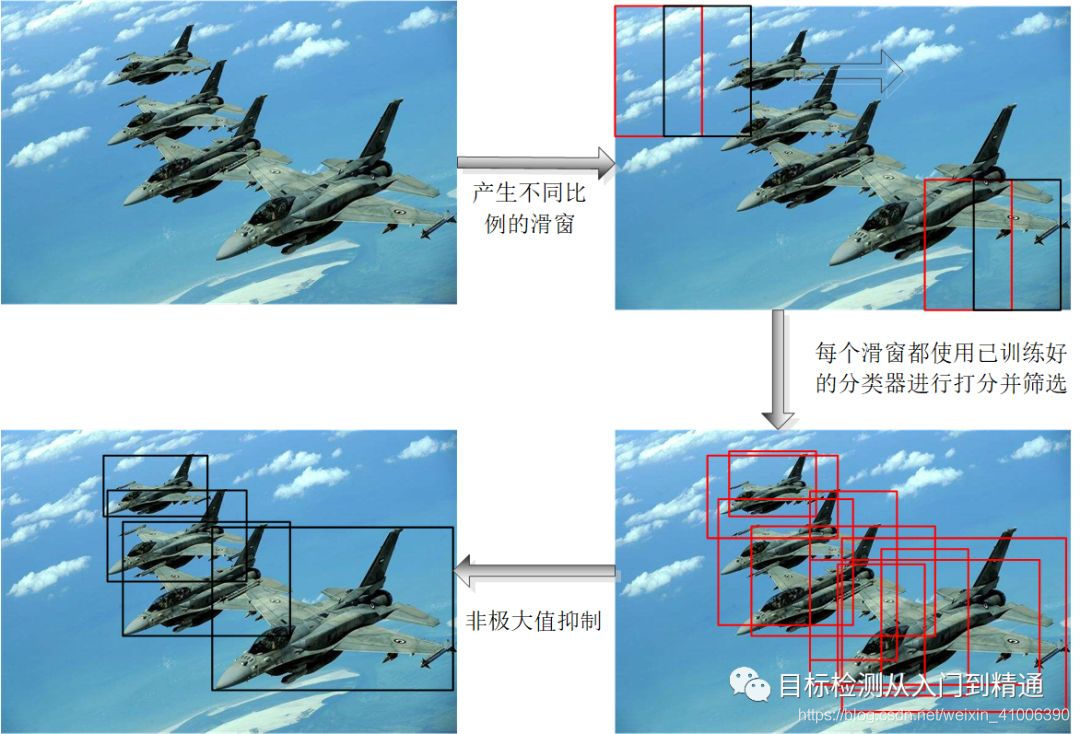
图 滑动窗口目标检测流程
对输入的图像设置不同大小的滑窗,确定步长遍历整个图像,每次滑动完成后对当前选择框进行特征提取(SIFT、HOG等),并使用事先训练好的分类器(SVM、Adaboost等)判断该区域中存在目标的概率。得到所有可能存在目标的滑窗,因为这些窗口会存在重复较高的部分,最后采用非极大值抑制(Non-Maximum Suppression, NMS)的方法进行筛选,经过NMS筛选后得到检测目标。
缺点
滑窗法简单易于理解,但是不同大小比例的窗口遍历图像导致选择框冗余;同时设计窗口时还需要考虑物体长宽比,增加了设计复杂度;手工设计的特征鲁棒性较差;效率低下,对于实时性要求较高的任务,不推荐使用滑窗法。
2.基于选择性搜索(Selective Search)的目标检测算法
利用图像中的边缘、纹理、颜色等信息,保证在选取较少(几百至几千)窗口的情况下保持较高的召回率(Recall)。
选择性搜索>>特征提取>>分类器
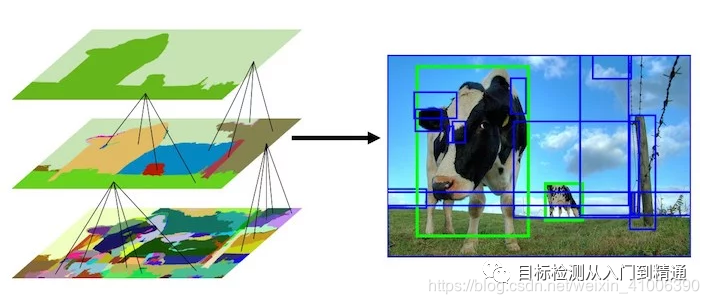
图 基于相似度的分割区域合并
首先使用图像分割方法初始化分割区域,然后计算相邻两个区域的相似度,每次合并最相似(通过颜色、纹理、大小和形状交叠判断)的两个区域,每次迭代过程中使用搜索框定位合并区域,直到最终剩下一块完整的区域,最后进行特征提取与分类。
总结
滑动窗口最大的缺点就在于选择框冗余,而选择性搜索可以有效地去除冗余候选框,使得计算量大大的减小。