引言:
前面介绍的R-CNN的速度慢在哪里?
答:每个候选区都要进行卷积操作提取特征。因此,SPPNet孕育而生。
1. SPPNet
SPPNet提出了SPP层,主要改进了以下两个方面:
- 减少卷积计算
- 防止图片内容变形
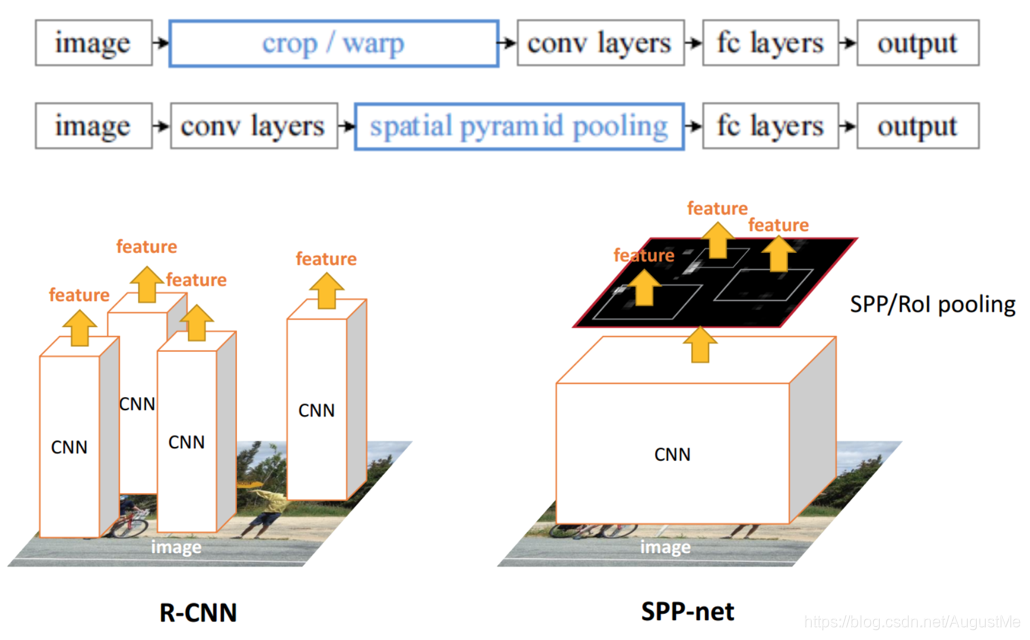
图中第一行代表R-CNN的检测过程,第二行是SPPNet的。输入进R-CNN卷积层的图像必须固定大小,因此要进过crop/warp,这会使原图片变形。而SPPNet直接将原图片输入CNN中,获其特征,使得原图片内容得以保真。
| R-CNN | SPPNet |
|---|---|
| 1、R-CNN是让每个候选区域经过crop/wrap等操作变换成固定大小的图像 2、固定大小的图像塞给CNN 传给后面的层做训练回归分类操作 | 1、SPPNet把全图塞给CNN得到全图的feature map 2、让候选区域与feature map直接映射,得到候选区域的映射特征向量 3、映射过来的特征向量大小不固定,这些特征向量塞给SPP层(空间金字塔变换层),SPP层接收任何大小的输入,输出固定大小的特征向量,再塞给FC层 |
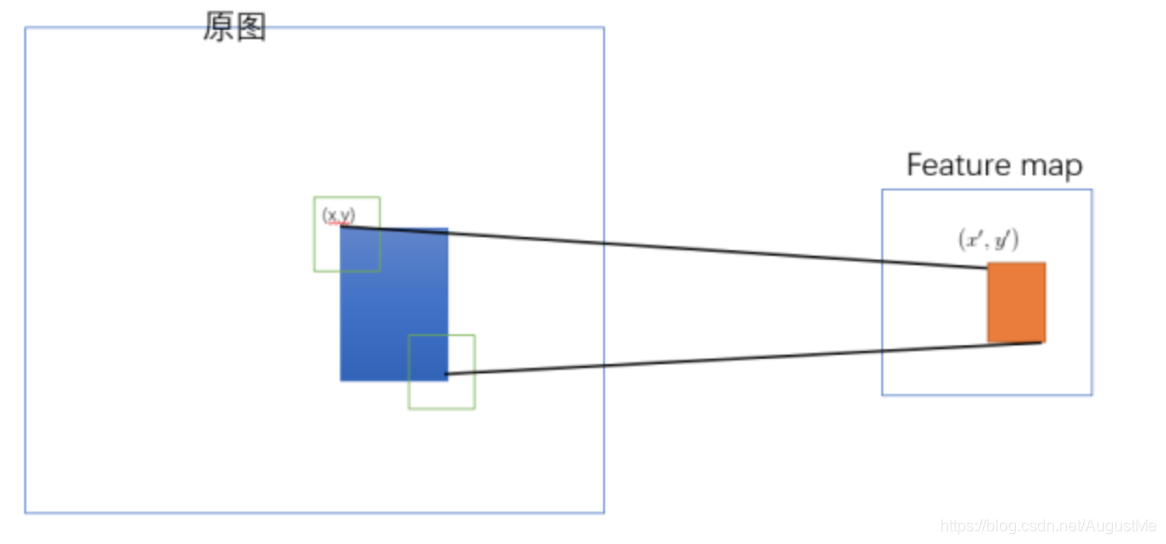
1.1 映射
原始图片经过CNN变成了feature map,原始图片通过选择性搜索(SS)得到了候选区域,现在需要将基于原始图片的候选区域映射到feature map中的特征向量。
映射过程图参考如下:

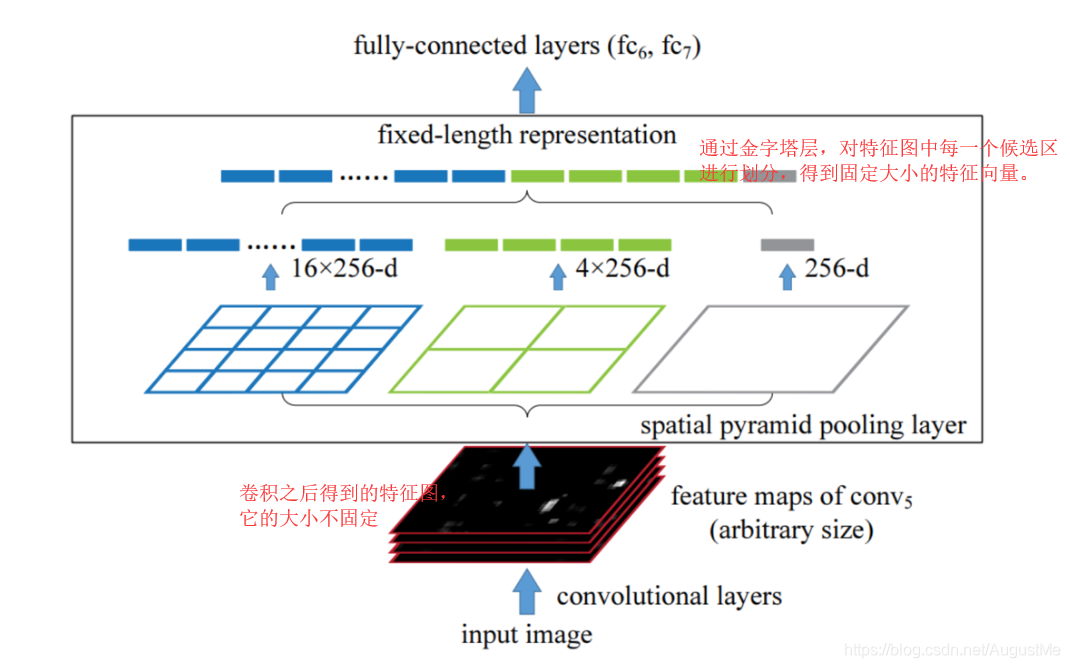
1.2 spatial pyramid pooling (空间金字塔变换层)
通过spatial pyramid pooling 将任意大小的特征图转换成固定大小的特征向量
示例:假设原图输入是224x224,对于conv出来后的输出是13x13x256的,可以理解成有256个这样的Filter,每个Filter对应一张13x13的feature map。
接着在这个特征图中找到每一个候选区域映射的区域,spp层会将每一个候选区域分成1x1,2x2,4x4三张子图,对每个子图的每个区域作max pooling,
得出的特征再连接到一起,就是(16+4+1)x256的特征向量,接着给全连接层做进一步处理,如下图:
2. SPPNet总结
来看下SPPNet的完整结构
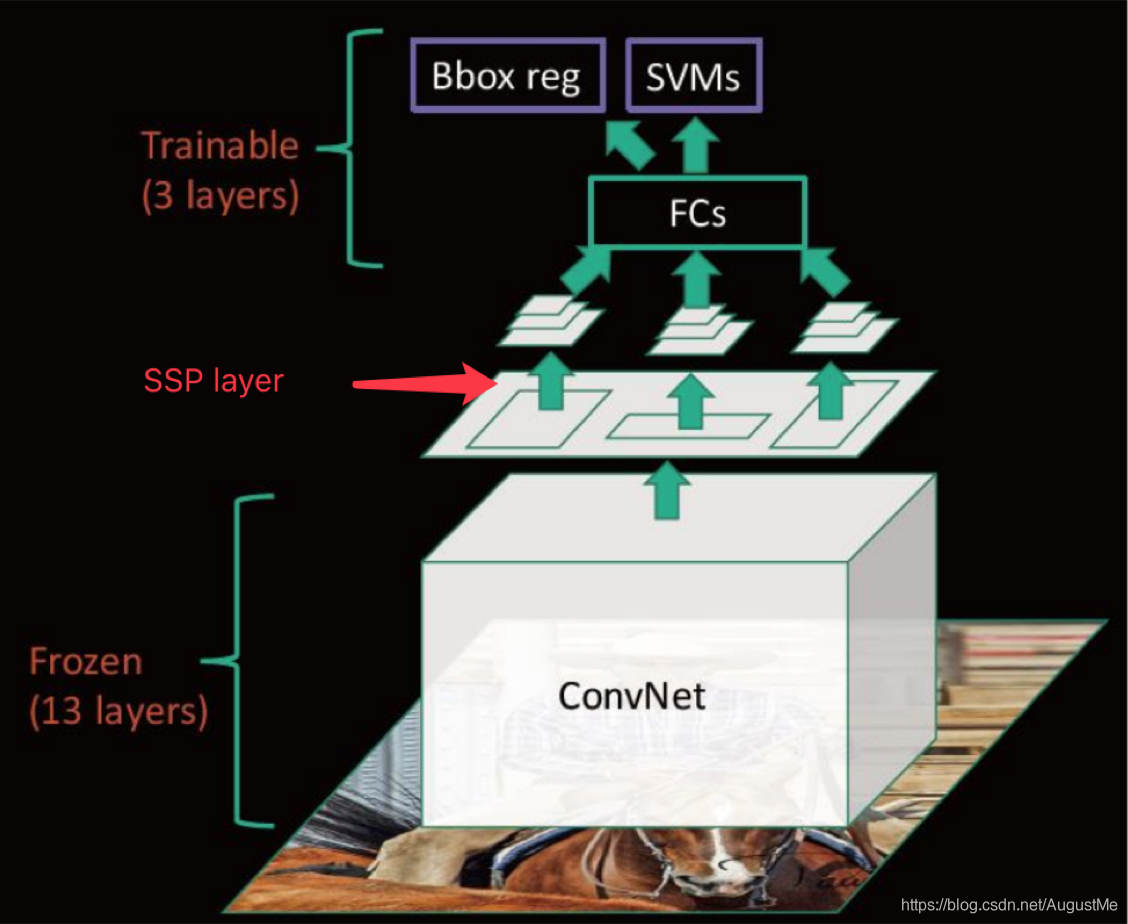
优点
SPPNet在R-CNN的基础上提出了改进,通过候选区域和feature map的映射,配合SPP层的使用,从而达到了CNN层的共享计算,减少了运算时间, 后面的Fast R-CNN等也是受SPPNet的启发
缺点
- 训练依然过慢、效率低,特征需要写入磁盘(因为SVM的存在)
- 分阶段训练网络:选取候选区域、训练CNN、训练SVM、训练bbox回归器, SPP-Net在fine-tuning阶段无法使用反向传播微调SPP-Net前面的Conv层
参考:
https://www.cnblogs.com/kongweisi/p/10899771.html