multi_object_tracking_slow.py:
#导入工具包 from utils import FPS import numpy as np import argparse import dlib import cv2 """ --prototxt mobilenet_ssd/MobileNetSSD_deploy.prototxt --model mobilenet_ssd/MobileNetSSD_deploy.caffemodel --video race.mp4 """ # 参数 ap = argparse.ArgumentParser() ap.add_argument("-p", "--prototxt", required=True, help="path to Caffe 'deploy' prototxt file") ap.add_argument("-m", "--model", required=True, help="path to Caffe pre-trained model") ap.add_argument("-v", "--video", required=True, help="path to input video file") ap.add_argument("-o", "--output", type=str, help="path to optional output video file") ap.add_argument("-c", "--confidence", type=float, default=0.2, help="minimum probability to filter weak detections") args = vars(ap.parse_args()) # SSD标签 CLASSES = ["background", "aeroplane", "bicycle", "bird", "boat", "bottle", "bus", "car", "cat", "chair", "cow", "diningtable", "dog", "horse", "motorbike", "person", "pottedplant", "sheep", "sofa", "train", "tvmonitor"] # 读取网络模型 print("[INFO] loading model...") net = cv2.dnn.readNetFromCaffe(args["prototxt"], args["model"]) # 初始化 print("[INFO] starting video stream...") vs = cv2.VideoCapture(args["video"]) writer = None # 一会要追踪多个目标 trackers = [] labels = [] # 计算FPS fps = FPS().start() while True: # 读取一帧 (grabbed, frame) = vs.read() # 是否是最后了 if frame is None: break # 预处理操作 (h, w) = frame.shape[:2] width=600 r = width / float(w) dim = (width, int(h * r)) frame = cv2.resize(frame, dim, interpolation=cv2.INTER_AREA) rgb = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB) # 如果要将结果保存的话 if args["output"] is not None and writer is None: fourcc = cv2.VideoWriter_fourcc(*"MJPG") writer = cv2.VideoWriter(args["output"], fourcc, 30, (frame.shape[1], frame.shape[0]), True) # 先检测 再追踪 if len(trackers) == 0: # 获取blob数据 (h, w) = frame.shape[:2] blob = cv2.dnn.blobFromImage(frame, 0.007843, (w, h), 127.5) # 得到检测结果 net.setInput(blob) detections = net.forward() # 遍历得到的检测结果 for i in np.arange(0, detections.shape[2]): # 能检测到多个结果,只保留概率高的 confidence = detections[0, 0, i, 2] # 过滤 if confidence > args["confidence"]: # extract the index of the class label from the # detections list idx = int(detections[0, 0, i, 1]) label = CLASSES[idx] # 只保留人的 if CLASSES[idx] != "person": continue # 得到BBOX #print (detections[0, 0, i, 3:7]) box = detections[0, 0, i, 3:7] * np.array([w, h, w, h]) (startX, startY, endX, endY) = box.astype("int") # 使用dlib来进行目标追踪 #http://dlib.net/python/index.html#dlib.correlation_tracker t = dlib.correlation_tracker() rect = dlib.rectangle(int(startX), int(startY), int(endX), int(endY)) t.start_track(rgb, rect) # 保存结果 labels.append(label) trackers.append(t) # 绘图 cv2.rectangle(frame, (startX, startY), (endX, endY), (0, 255, 0), 2) cv2.putText(frame, label, (startX, startY - 15), cv2.FONT_HERSHEY_SIMPLEX, 0.45, (0, 255, 0), 2) # 如果已经有了框,就可以直接追踪了 else: # 每一个追踪器都要进行更新 for (t, l) in zip(trackers, labels): t.update(rgb) pos = t.get_position() # 得到位置 startX = int(pos.left()) startY = int(pos.top()) endX = int(pos.right()) endY = int(pos.bottom()) # 画出来 cv2.rectangle(frame, (startX, startY), (endX, endY), (0, 255, 0), 2) cv2.putText(frame, l, (startX, startY - 15), cv2.FONT_HERSHEY_SIMPLEX, 0.45, (0, 255, 0), 2) # 也可以把结果保存下来 if writer is not None: writer.write(frame) # 显示 cv2.imshow("Frame", frame) key = cv2.waitKey(1) & 0xFF # 退出 if key == 27: break # 计算FPS fps.update() fps.stop() print("[INFO] elapsed time: {:.2f}".format(fps.elapsed())) print("[INFO] approx. FPS: {:.2f}".format(fps.fps())) if writer is not None: writer.release() cv2.destroyAllWindows() vs.release()
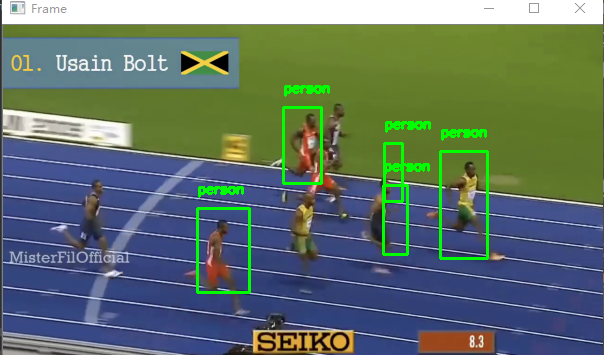
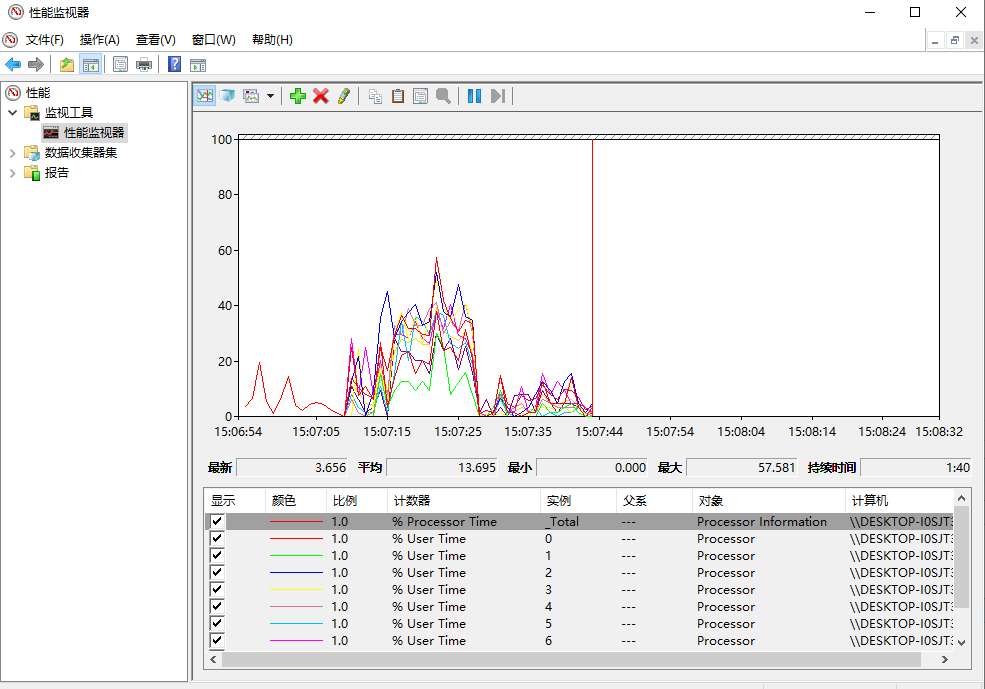
效果:
multi_object_tracking_fast.py:
from utils import FPS import multiprocessing import numpy as np import argparse import dlib import cv2 #perfmon def start_tracker(box, label, rgb, inputQueue, outputQueue): t = dlib.correlation_tracker() rect = dlib.rectangle(int(box[0]), int(box[1]), int(box[2]), int(box[3])) t.start_track(rgb, rect) while True: # 获取下一帧 rgb = inputQueue.get() # 非空就开始处理 if rgb is not None: # 更新追踪器 t.update(rgb) pos = t.get_position() startX = int(pos.left()) startY = int(pos.top()) endX = int(pos.right()) endY = int(pos.bottom()) # 把结果放到输出q outputQueue.put((label, (startX, startY, endX, endY))) ap = argparse.ArgumentParser() ap.add_argument("-p", "--prototxt", required=True, help="path to Caffe 'deploy' prototxt file") ap.add_argument("-m", "--model", required=True, help="path to Caffe pre-trained model") ap.add_argument("-v", "--video", required=True, help="path to input video file") ap.add_argument("-o", "--output", type=str, help="path to optional output video file") ap.add_argument("-c", "--confidence", type=float, default=0.2, help="minimum probability to filter weak detections") args = vars(ap.parse_args()) # 一会要放多个追踪器 inputQueues = [] outputQueues = [] CLASSES = ["background", "aeroplane", "bicycle", "bird", "boat", "bottle", "bus", "car", "cat", "chair", "cow", "diningtable", "dog", "horse", "motorbike", "person", "pottedplant", "sheep", "sofa", "train", "tvmonitor"] print("[INFO] loading model...") net = cv2.dnn.readNetFromCaffe(args["prototxt"], args["model"]) print("[INFO] starting video stream...") vs = cv2.VideoCapture(args["video"]) writer = None fps = FPS().start() if __name__ == '__main__': while True: (grabbed, frame) = vs.read() if frame is None: break (h, w) = frame.shape[:2] width=600 r = width / float(w) dim = (width, int(h * r)) frame = cv2.resize(frame, dim, interpolation=cv2.INTER_AREA) rgb = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB) if args["output"] is not None and writer is None: fourcc = cv2.VideoWriter_fourcc(*"MJPG") writer = cv2.VideoWriter(args["output"], fourcc, 30, (frame.shape[1], frame.shape[0]), True) #首先检测位置 if len(inputQueues) == 0: (h, w) = frame.shape[:2] blob = cv2.dnn.blobFromImage(frame, 0.007843, (w, h), 127.5) net.setInput(blob) detections = net.forward() for i in np.arange(0, detections.shape[2]): confidence = detections[0, 0, i, 2] if confidence > args["confidence"]: idx = int(detections[0, 0, i, 1]) label = CLASSES[idx] if CLASSES[idx] != "person": continue box = detections[0, 0, i, 3:7] * np.array([w, h, w, h]) (startX, startY, endX, endY) = box.astype("int") bb = (startX, startY, endX, endY) # 创建输入q和输出q iq = multiprocessing.Queue() oq = multiprocessing.Queue() inputQueues.append(iq) outputQueues.append(oq) # 多核 p = multiprocessing.Process( target=start_tracker, args=(bb, label, rgb, iq, oq)) p.daemon = True p.start() cv2.rectangle(frame, (startX, startY), (endX, endY), (0, 255, 0), 2) cv2.putText(frame, label, (startX, startY - 15), cv2.FONT_HERSHEY_SIMPLEX, 0.45, (0, 255, 0), 2) else: # 多个追踪器处理的都是相同输入 for iq in inputQueues: iq.put(rgb) for oq in outputQueues: # 得到更新结果 (label, (startX, startY, endX, endY)) = oq.get() # 绘图 cv2.rectangle(frame, (startX, startY), (endX, endY), (0, 255, 0), 2) cv2.putText(frame, label, (startX, startY - 15), cv2.FONT_HERSHEY_SIMPLEX, 0.45, (0, 255, 0), 2) if writer is not None: writer.write(frame) cv2.imshow("Frame", frame) key = cv2.waitKey(1) & 0xFF if key == 27: break fps.update() fps.stop() print("[INFO] elapsed time: {:.2f}".format(fps.elapsed())) print("[INFO] approx. FPS: {:.2f}".format(fps.fps())) if writer is not None: writer.release() cv2.destroyAllWindows() vs.release()
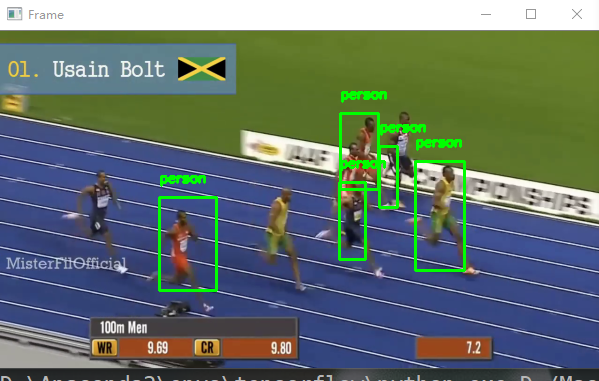
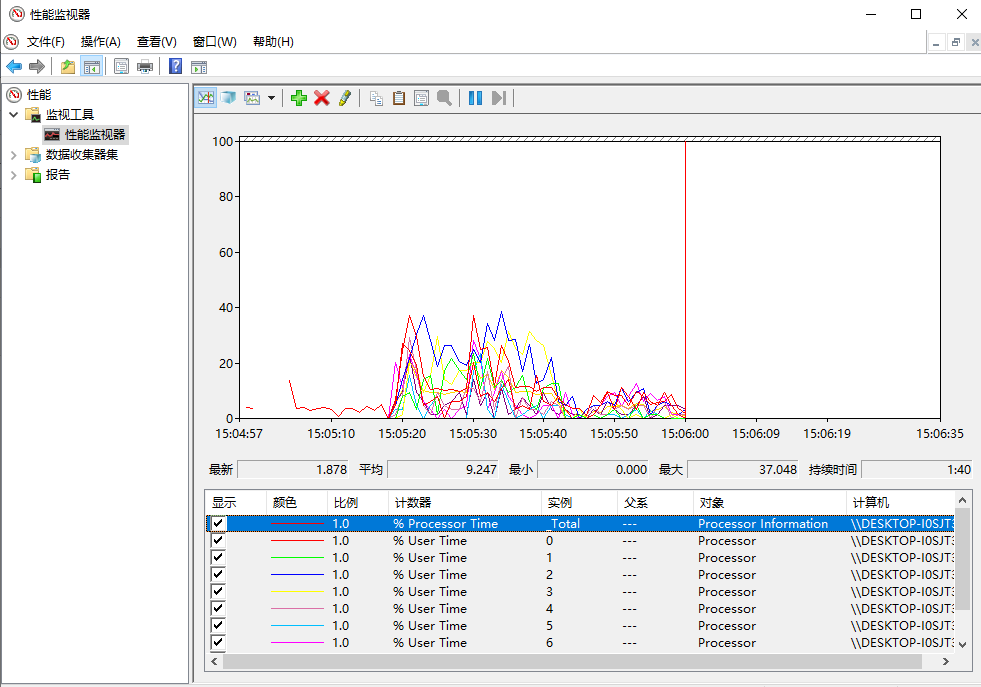
效果: