Arduino/stm32 智能小车设计(一)
智能小车原理图设计
智能小车原理图组件包括:
1、处理器:我这里用的是Arduino UNO控制板;
2、电机驱动芯片:L293DD贴片式封装;
3、稳压芯片:AMS1117 5.0V;
4、四路运放:LM324;
5、两个红外对管和两个RPR220寻迹对管;
6、四个50K 0932电位器分别对应四个红外对管,作为红外对管灵敏度调节;
7、按键、LED、蓝牙模块PH2.45 4P排母座子、超声波模块PH2.45 4P排母座子、RGB指示灯;
8、红外遥控器接收头:HS0038;
9、充电模块:EUP8207充电芯片;
以上所有器件淘宝都能买到。
模块设计
一、控制模块
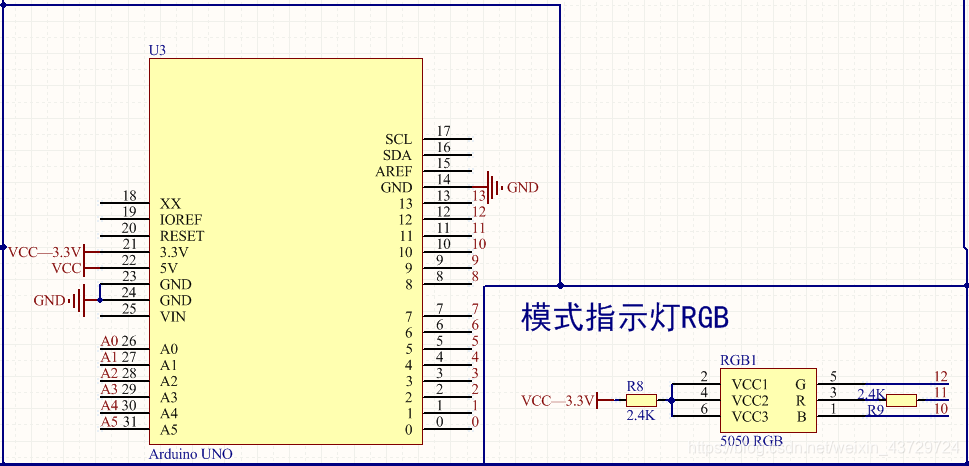
功能:控制单元,编写代码对所有外设进行逻辑控制。
这里用的Arduino UNO模块,为了方便用户理解,原理图上的IO口定义,严格按照UNO端口定义,如上图,我的智能小车把所有IO口占用完了。右下角为RGB模式指示灯。
二、供电模块
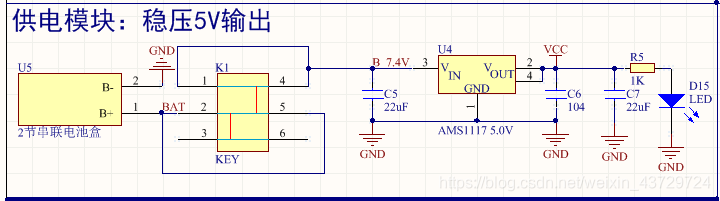
功能:对所有外设及控制单元供电。
这里采用AMS1117 5.0V稳压芯片,输出5.0V电压给外设及Arduino模块供电,K1为开关、U5为两节14500电池串联的电池盒。
三、充电管理模块
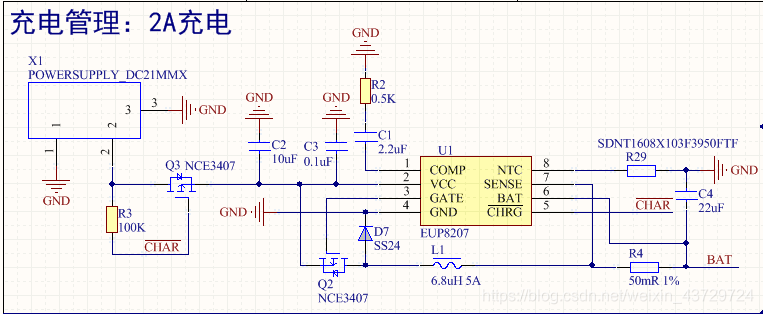
功能:给电池充电。
如图:X1:为适配器12V输入端口、采用EUP8207充电管理芯片输出2A电流给电池充电。
四、电机驱动模块
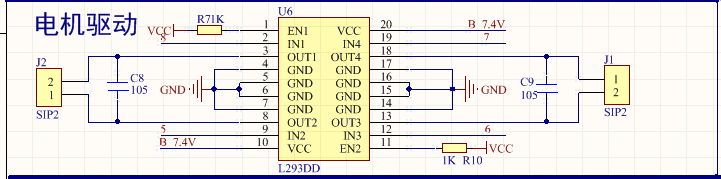
功能:驱动两个电机正反转。
如图所示,当IO口8输出高电平、5输出低电平时,J2电机电流从 2->1;
当IO口8输出低电平、5输出高电平时,J2电机电流从 1->2;
当两个IO口都给低电平是,电机停止运动。
当然也可以对两个IO口进行PWM控制,实现电机调速功能。对J1的控制方法与J2一样。
五、红外寻迹及红外避障模块
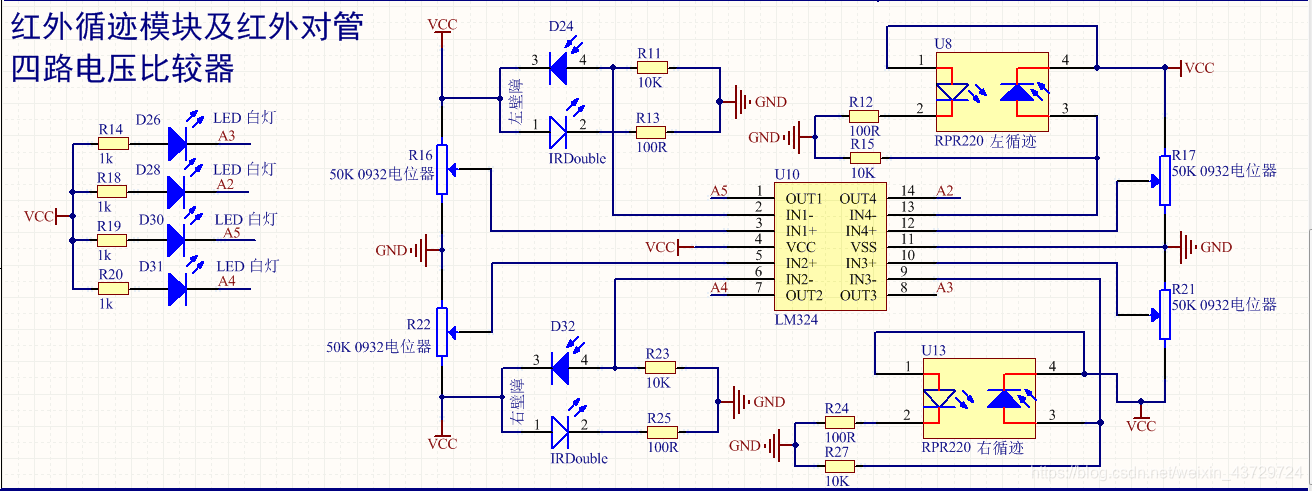
功能:实现红外避障和黑线寻迹的功能。
如图所示,小车采用四路运放LM324正好对应四个红外对管,先看R16、D24 是左避障红外对管和灵敏度调节器。当旋转R16时,IN1+端口电压随之改变,IN1-端口电压由红外接收管探测到红外线光强而变。
对比INI+、IN1-两个端口的电压、当IN1+ > IN1-是OUT1输出高,否则输出低电平(输出低电平时,D30亮灯,方便用户调试),通过控制单元采集A5的高/低电平,判断小车左边是否有障碍物。右避障同理!
寻迹RPR220原理,如果探测到黑线或者白纸,接收管接收到的红外线光强变化,从而引起运放IN4-电压变化,电位器电压变化通过旋转0932电位器调节,从而实现灵敏度调节。
六、其它模块
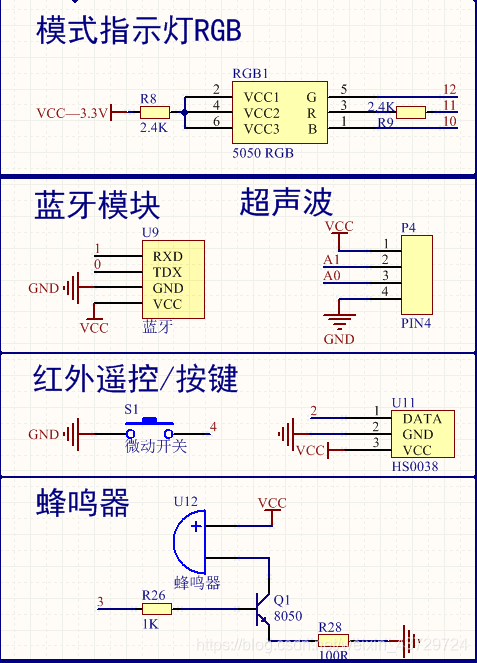
如图、蜂鸣器、按键、蓝牙、超声波、HS0038红外遥控接收头、RGB指示灯在前面已经有了。
超声波和蓝牙模块只需要一个PH2.54 4P排母座子即可,相关模块可以从淘宝购买。
相关原理,在以后代码讲解时,进行叙述!!!
七、流水灯模块
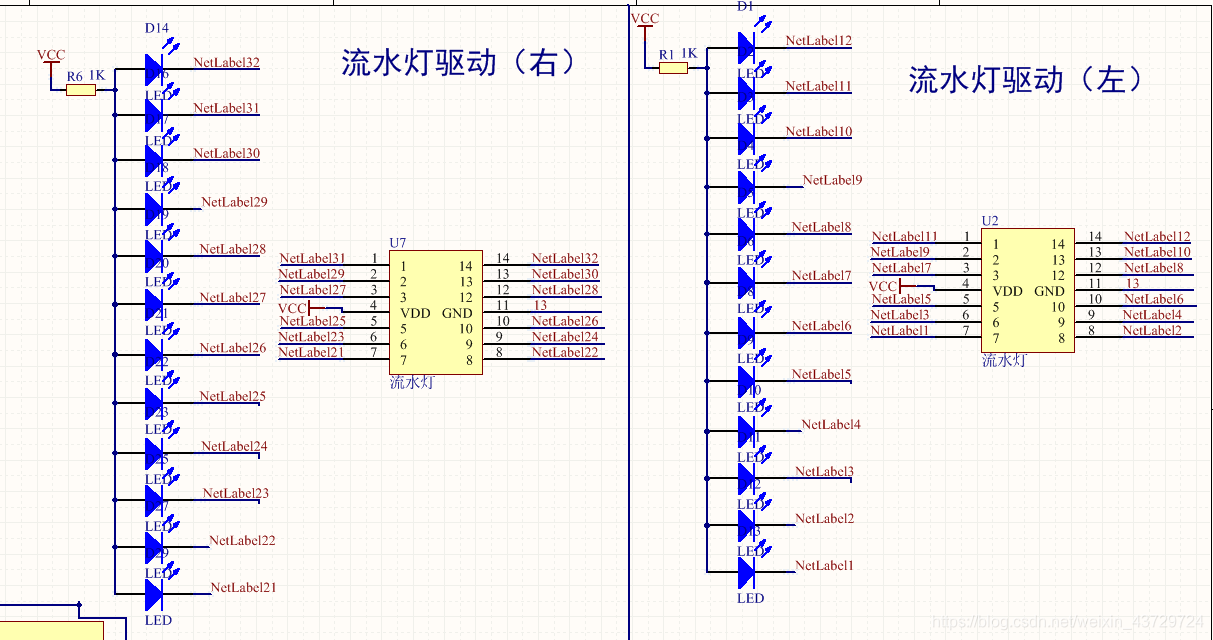
功能:小车外围装饰灯。
这部分功能相对简单,采用淘宝定制流水灯芯片,当IO口13给低电平时,LED灯实现流水灯效果。
到此为止、所有原理图奉上。
转载请标明出处,谢谢!!
Arduino/stm32智能小车群:916385027
如果找不到群:可加QQ:971312944
