基于STM32的智能小车设计
前言
STM32智能小车一直是大家很喜欢的小设计,智能小车的制作虽然难度不高,但是对于初学者来说,由于陌生,因此也总是觉得门槛高。事实上,很多东西都禁不起深挖,当你做完之后才会发现,原来也不过如此。本篇主要针对某宝上制作智能小车过程中用到的各种结构模块进行统一阐述,为大家提供参考。(以stm32为核心,配合电机驱动、舵机和超声波模块,实现小车的自动避障功能。)
一、什么是STM32智能小车?
智能循迹避障小车是基于自动引导机器人系统,用以实现小车自动识别路线,以及选择正确的路线。智能循迹小车是一个运用传感器、开发板、电机驱动及自动控制等技术来实现按照预先设定的模式下,不受人为管理时能够自动实现循迹导航的科技。
二、模块汇总
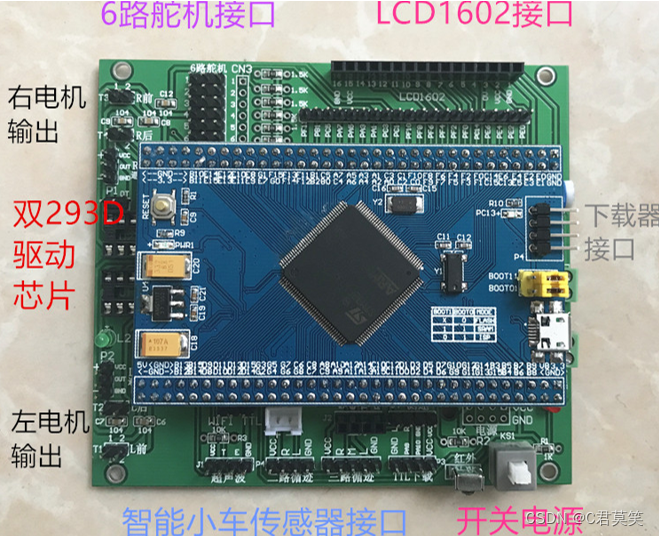
1.主控板(STM32F103ZE)
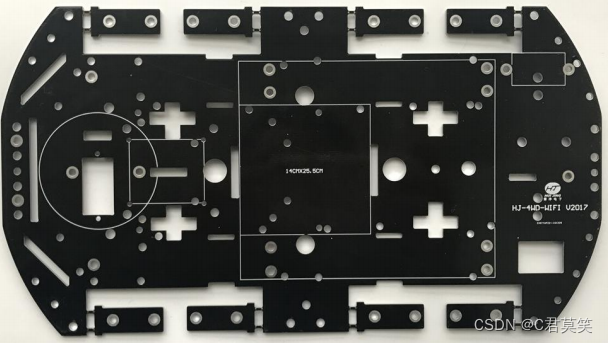
2.底板
3.电机

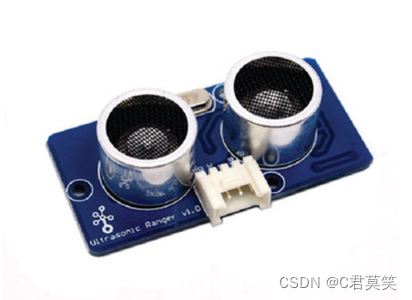
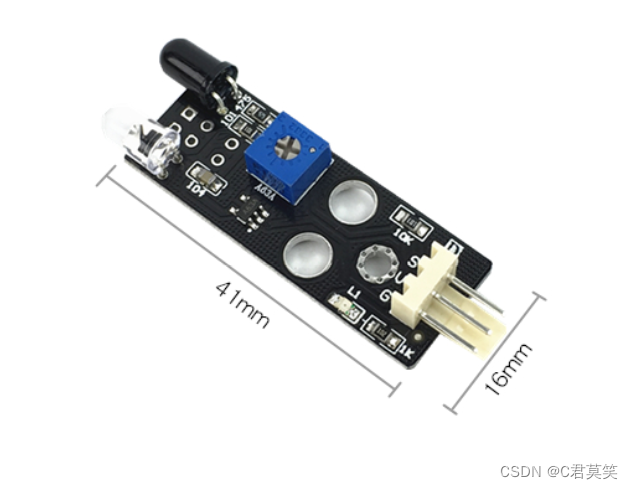
4.避障模块(超声波传感器,红外传感器)
5.寻迹模块(3路红外传感器)

6.云台模块(SG90舵机)

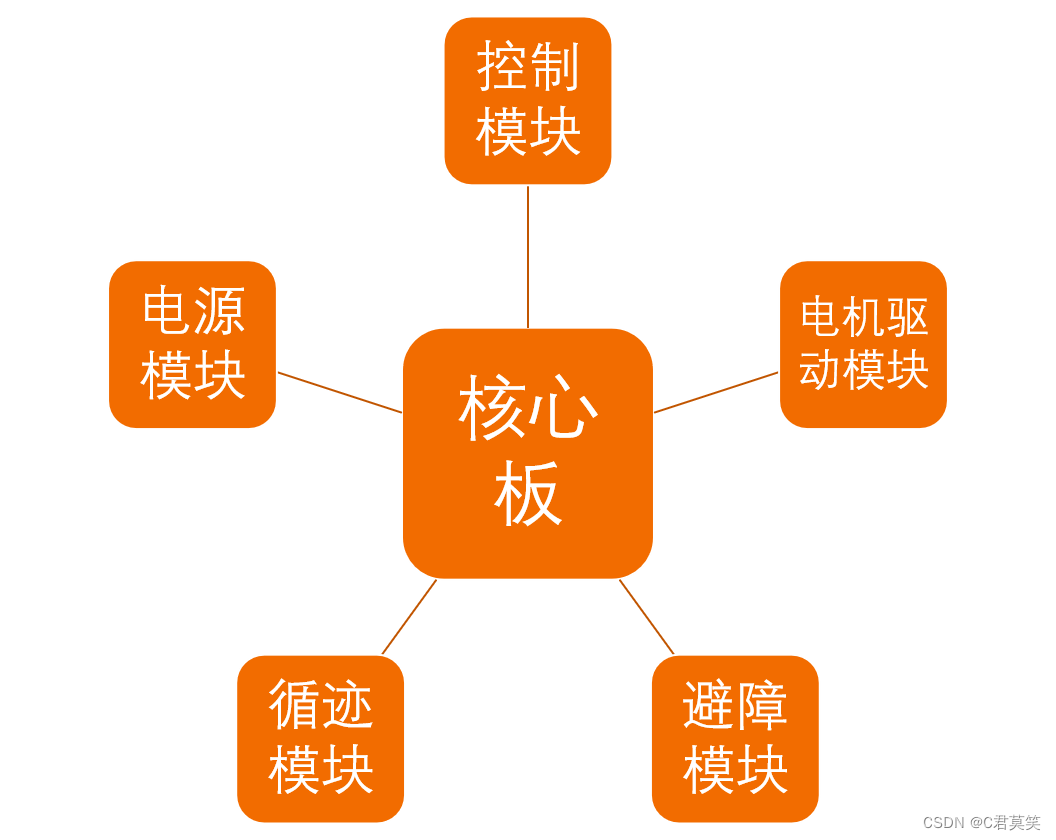
三、小车控制系统的结构框图
四、小车系统方案设计
1.核心板
arduino,C51,STM32,AMR板(树莓派,Jetson Nano,小熊派)
2.循迹模块
红外循迹传感器,电磁寻迹传感器,摄像头
3.避障模块
红外循迹避障模块,超声波模块,摄像头
4.电机驱动模块
直流减速电机,霍尔编码器直流减速电机

目前比较流行的是采样ARM+STM32组合进行智能小车设计,ARM板能够比较高效的进行图形图像处理,然后把处理后的数据发送给32板对设备进行控制。

5.麦克纳姆轮
麦克纳姆轮全向轮

五、小车模块设计
1.STM32核心板
为什么选择 STM32 进行智能小车设计?32基于ARM内核的32位MCU系列,内核为ARM公司为要求高性能、低成本、低功耗的嵌入式应用专门设计的Cortex-M内核,是标准的ARM架构 (Cortex-M3采用ARMv7-M架构)。有高性能,低电压 ,低功耗特性。

STM32用着丰富的外设,例如GPIO、USART、ADC、PWM、TIMER、硬件SPI、硬件IIC、USB等。在智能小车设计中,将会使用到的它的外设有:GPIO、TIMER和PWM。其中,GPIO和TIMER用于控制电机正反转、控制超声波测距以及舵机转向引脚的信号;PWM用于调节电机转速。
2.3路寻迹模块

当循迹传感器照到黑线时输出点平0,照到白线时输出1.如上图所示,A,B,C三路。
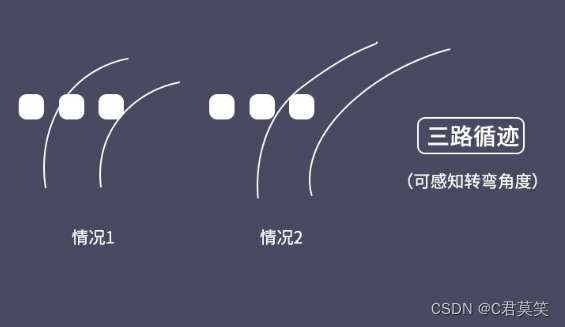
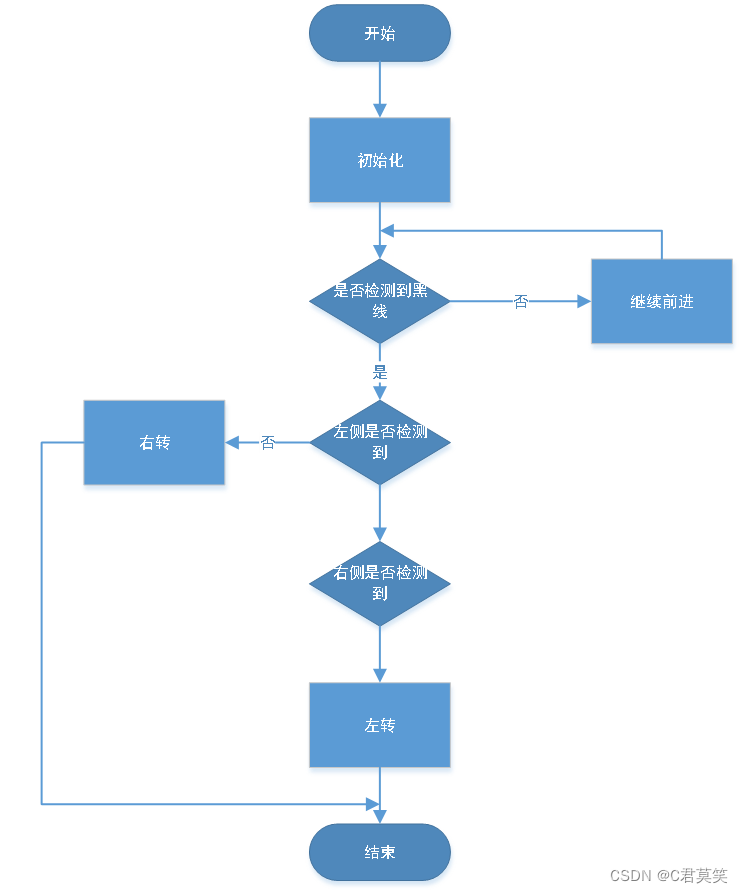
三路巡线小车控制逻辑:
A B C 状态为 1 0 1 ,B路正照到黑线上,小车前进
A B C 状态为 0 0 1 , A,B 照到黑线上, 小车左转弯
A B C 状态为 0 1 1 , A 在黑线上, , 小车左转弯
A B C 状态为 1 0 0, B,C在黑线上, 小车右转弯
A B C 状态为 1 1 0, C 在黑线上 , 小车右转弯
A B C 状态为 1 1 1, A B C 都不在黑线上,小车保持上一次状态不变
A B C 状态为 0 0 0 , A B C 都在黑线上, 小车停止。
小车寻迹流程图
3.避障模块
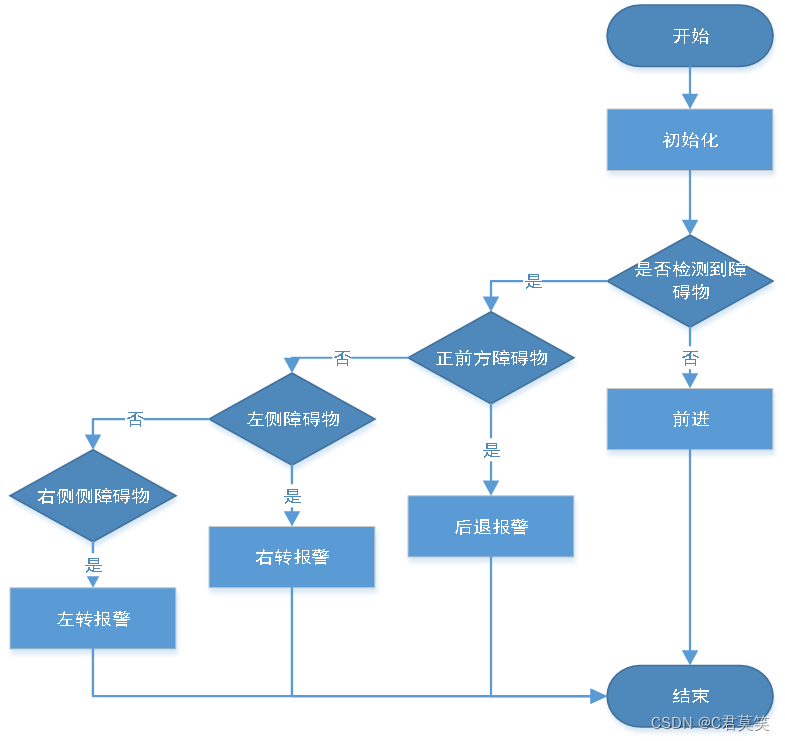
智能小车在行走过程中,当控制层检测到遥控器发出防撞信号后,直接调用防撞报警函数,完成防撞报警功能。如果前方检测到有障碍,无法通过,小车则后退转向报警;如果左侧有障碍则控制层控制车右转;如果右侧有障碍物则控制层控制车左转。
小车避障流程图
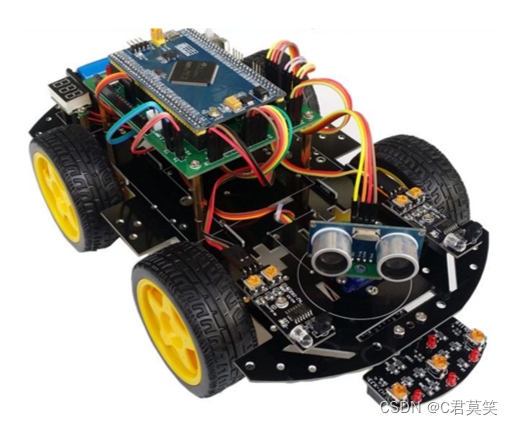
六、实物展示
总结
以上就是今天要讲的内容,智能小车设计整个系统以STM32为主控芯片,辅以各种传感器来检测路面、障碍物等周围环境,实现对小车简单运动的控制。