基于STM32的智能小车
第一章 基于STM32的智能小车方案设计
第二章 基于STM32的智能小车–电机驱动设计
第三章 基于STM32的智能小车–循迹设计
目录
前言
本篇主要针对某宝上制作智能小车过程中用到的避障设计进行统一阐述,为大家提供参考。
一、什么是避障小车 ?
用红外光电传感器,探测到物体即输出脉冲,输入到单片机中处理一下,再对电机驱动模块进行控制,实现壁障的功能,这样的避障小车又称为简单的避障机器人。
二、常见避障方法
1、红外线避障
红外避障原理
- 基本硬件:红外发射管和接收管
分离式和一体式 - 变送电路:模拟量;数字量:
将模拟量经过比较器输出开关量

2、超声波避障
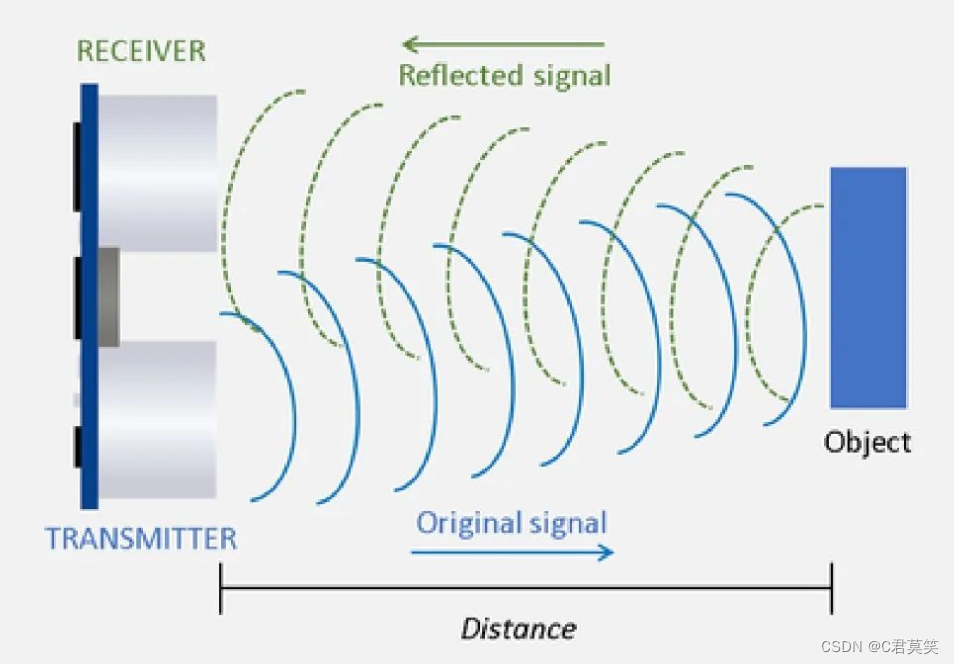
超声波避障原理
超声波避障,顾名思义,就是利用超声波的作用原理实现避障功能。通过测量超声波从发出到接收的时间差,根据声速(340m/s)计算出物体的距离,移动时通过一定的策略绕开障碍物的过程。便利店“欢迎光临”的自动门,“倒车请注意,倒车请注意…”的汽车倒车系统等都是常见的超声波避障场景。
- 给 IO 口 TRIG 至少 10 μs 的高电平信号触发测距;
- 模块自动发送 8 个 40 khz 的方波,自动检测是否有信号返回;
- 有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。

(eg:四个引脚VCC(DC5V)、Triger(发射端)、Echo(接收端)、GND(地)。)
因此,可以得到测试距离=(高电平时间*声速)/2 #声速一般取340 m/s
超声波避障原理示意图
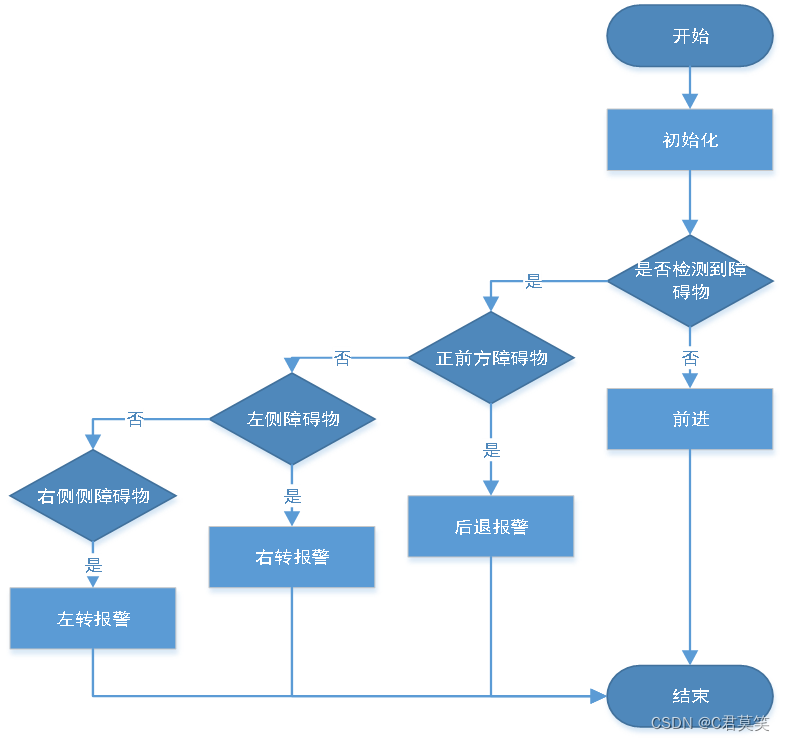
三、避障小车控制流程图
智能小车在行走过程中,如果前方检测到有障碍,无法通过,小车则后退转向报警;如果左侧有障碍则控制层控制车右转;如果右侧有障碍物则控制层控制车左转。
四、软件驱动代码编写
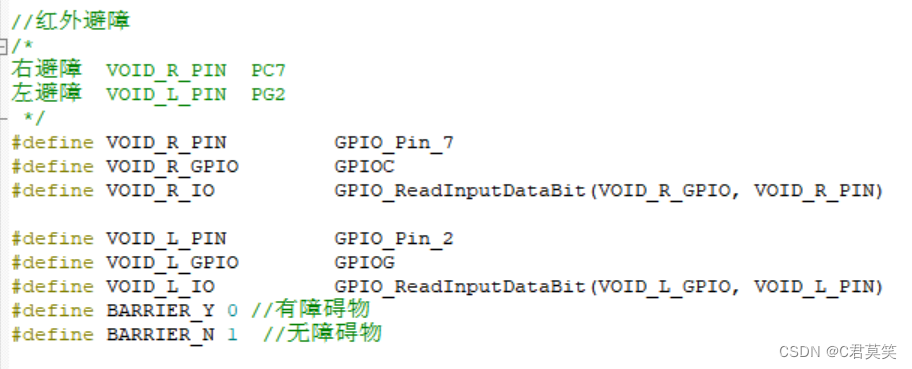
1、红外避障核心设计
- 相关引脚定义
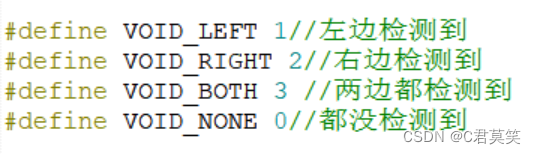
- 获取红外避障模块状态
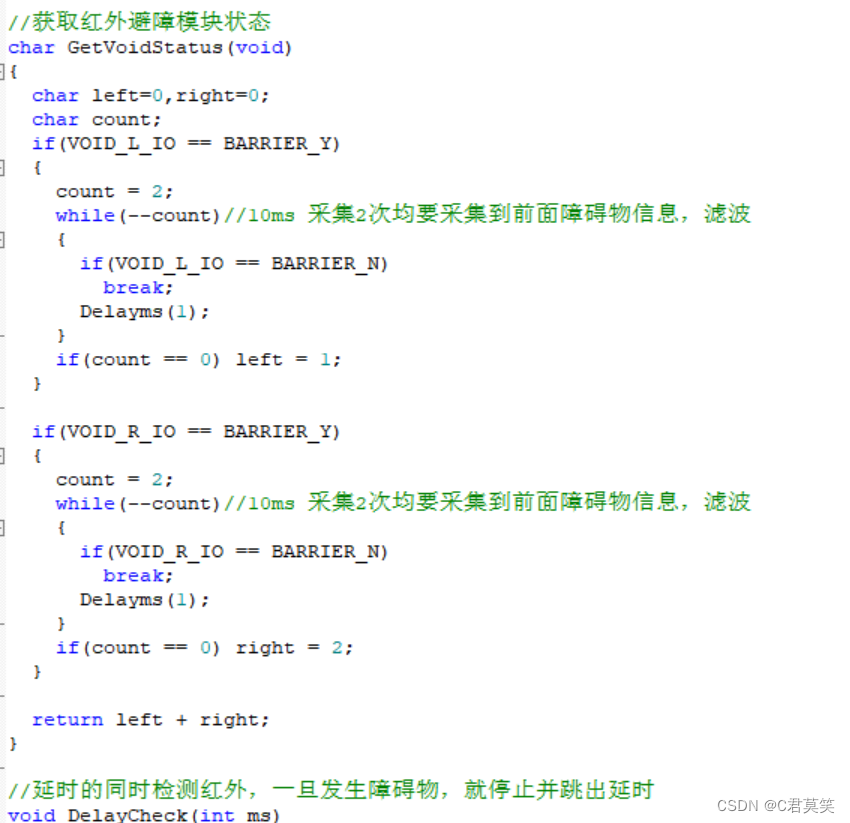
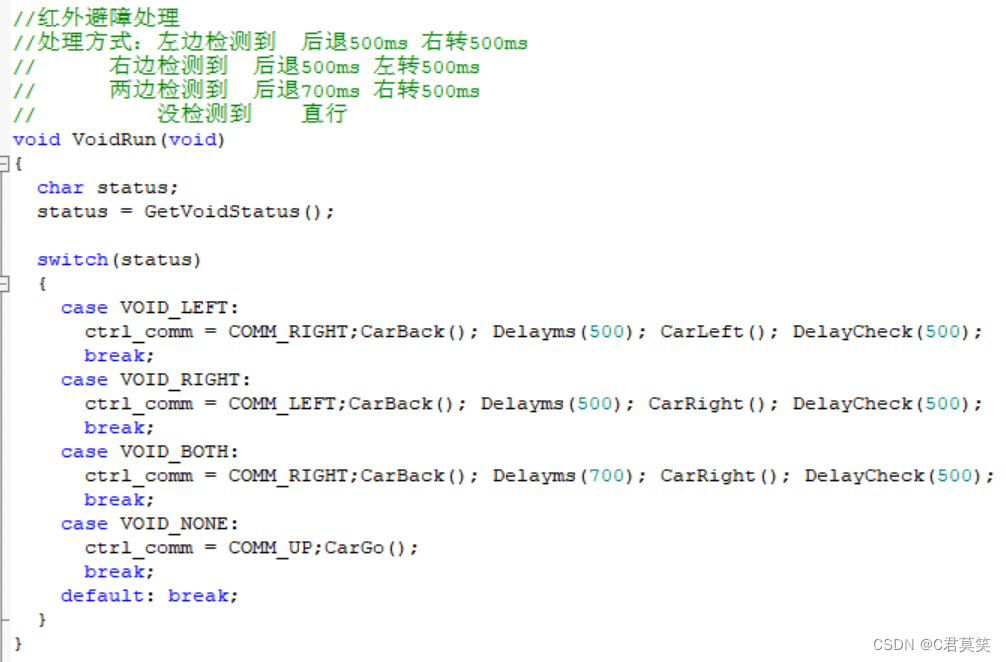
- 避障核心逻辑
扫描二维码关注公众号,回复:
14370505 查看本文章

2、超声波避障核心设计
-
相关引脚定义
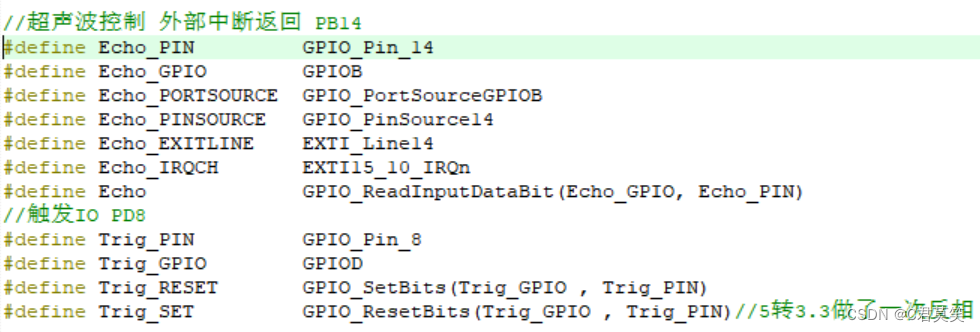
-
测距计算函数
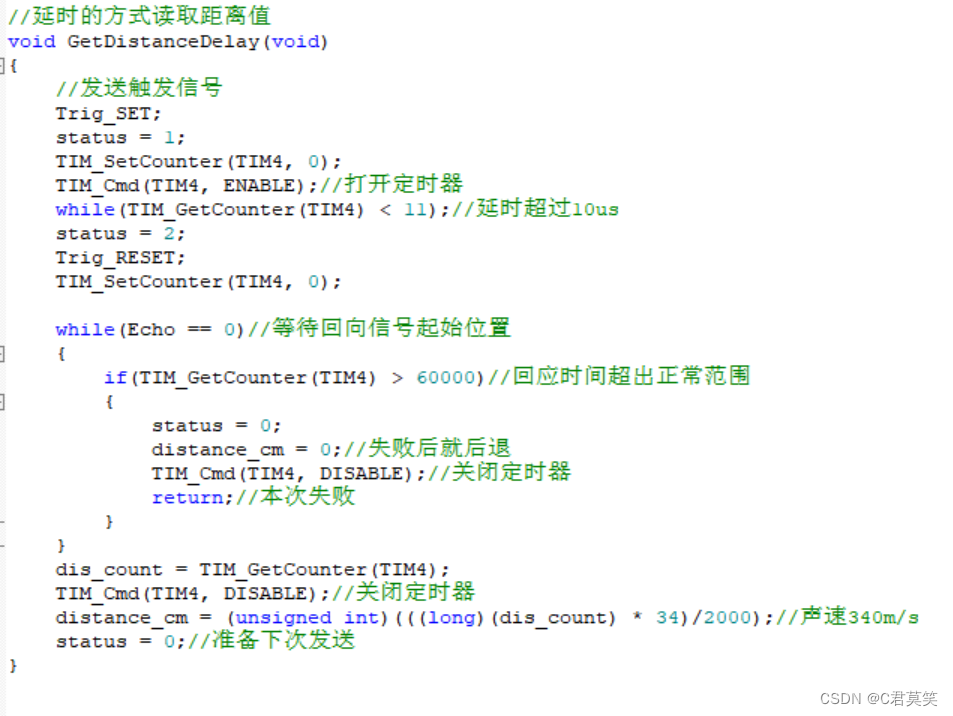
-
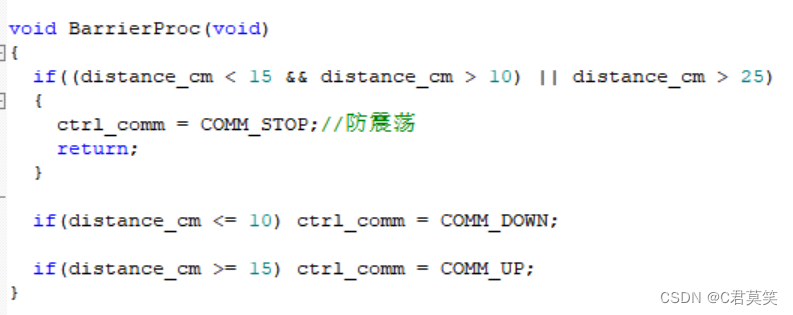
避障核心逻辑
总结
基于STM32智能小车的避障设计介绍就到这里