SPASS多元统计分析在无人机航线精度方面的综合评价
无人机作为获取低空航空影像的载体,其航线飞行精度直接决定影像的质量与后期图像数据处理精度。GPS/IMU系统作为无人机目标航点及任务航点导航与定位的主要控制系统,其可靠性决定了航线飞行质量。基于此,对GPS/IMU获取的数据进行了定量分析。首先,应用因子分析模型将影响航线精度的五类因素(偏离度、航向点间距、旁向点间距、横滚角、俯仰角、方向角)归化为三类主因子(GPS导航误差因子、飞机姿态误差因子、飞机系统误差因子)。然后,应用回归模型分析得出三类主因子之间的线性关系,从而定量分析得出无人机飞行因子对航线精度的影响程度,为以后无人机航线设计中涉及到的因素提供了参考。
1 无人机航线精度可行性分析
由于GPS定位得到的是曝光点三维坐标,无法根据曝光点的坐标去检验航线飞行精度,要经过求解航向相邻曝光点间距离,旁向相邻点间的距离,每个航点偏离航线的距离去量化三维坐标,就可以根据距离增量和飞行姿态进行分析。以下是经过量化后的变量:
偏离度y ;航向点间距x1 ;旁向点间距x2 ;
横滚角x3 ;俯仰角x4 ;方向角x5 。
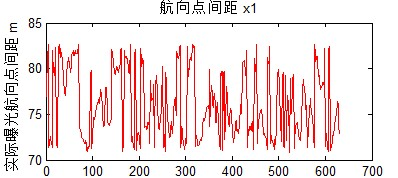
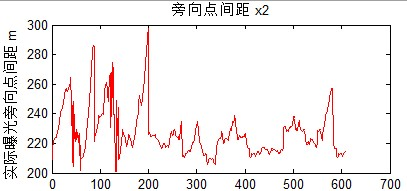
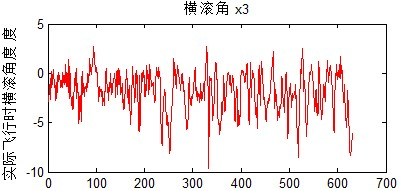
量化后得偏离度y数据630个、航向点间距x1数据630个、旁向点间距x2数据630个、横滚角x3数据630个、俯仰角x4数据630个、方向角x5数据630个。其中偏离度y代表了实际飞行曝光航点点位与设计曝光航点点位的相对位置关系,航向点间距x1代表同一条航线相邻两曝光点之间的距离,旁向点间距x2代表位于相邻两条航线上相邻两曝光点之间的距离,横滚角x3代表飞机飞行时的滚转角度,俯仰角x4代表飞机飞行时的俯仰角度,方向角x5代表飞机飞行时的航向角度。偏移量y最能表达航线定位精度,只要分析出其余变量对y的影响,就可以判断出是何种因子影响了航线定位精度,影响程度如何。
2 实际飞行后GPS航点点位与IMU角元素

偏离度y描述的是实际飞行曝光航点点位与设计曝光航点点位的相对位置关系,若y值位于0附近,说明实际飞行航点与设计曝光点较好吻合,由上图可以看出所有实际曝光点的y值都在-10至10之间震荡,大致呈现出规律性和周期性。


3 分析方法与原理
由上述图我们只能大致的看出各个影响因素自身存在某种关系或是周期性的变化,因素与因素之间也会存在某种相关性的关系,如何去确切的量化这种关系,准确判断出各因子与偏离度之间的关系,采用因子分析方法和回归方法。
3.1 应用因子分析方法
,将相关性较大的因子变量进行分组,对数据进行降维求解出公共因子,然后根据提取出来的F变量对偏离度y采用回归方法进行精度分析,得到各个变量之间的线性关系表达式。
3.2 因子旋转
因子分析的目的不仅是找出因子,更重要的是知道每个因子的意义,以便对实际问题进行分析。如果因子的典型代表变量不很突出,为了能够更好地解释公因子F,还需要进行因子旋转。通过适当的旋转可得到比较满意的主因子,使得每个原始变量仅在一个公因子上有较大的载荷,而在其余的公因子上的载荷比较小。
进行因子旋转,就是要使因子载荷矩阵的平方值向0和1两个方向分化,即使大的载荷更大,小的载荷更小。本文选取因子旋转方法中最常用的方差最大化正交旋转。
3.3 因子得分
在因子分析中,用公因子反映原始变量,这样有利于描述研究对象的特征,将因子表示为原始变量的线性组合,即因子得分函数:

3.4 回归分析
回归分析是建立因变量Y(或称依变量)与自变量X(或称独变量)之间关系的模型。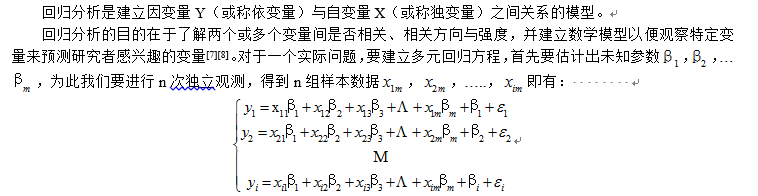
3.5 回归方程、回归系数显著性检验、残差项的检验
回归方程的显著性检验应用F统计量进行检验,回归系数的显著性检验应用t统计。
在进行残差分析时,要考虑到:对回归函数的线性诊断,对误差项独立性检验,对误差项正态性的检验,多重共线性的处理。其中对回归函数的线性诊断和对误差项正态性的检验的通过散点图即可判断出,多重共线性的处理根据VIF的大小即可判断出,误差项独立性检验主要是Durbin-Waston检验。
4 航线精度综合评价
4.1 基于因子分析的处理方法
在进行因子分析前,由于量纲的问题,本文应用Z标准化方法对GPS航点的三维坐标数量级进行量纲化处理,即每一变量值与其平均值之差除以该变量的标准差。无量纲化后各变量的平均值为0,标准差为1,从而消除量纲和数量级的影响。
数据标准化

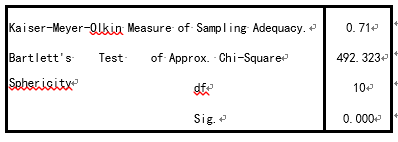
Bartlett检验
因子提取

通过spass软件的分析,利用相关矩阵R做因子分析,输出结果如下表,根据因子提取的判断准则,可以看到特征值大于1的个数为3个,且前3个因子累计贡献率达到了77.660%,可以初步得出提取3个公因子是合适的。

因子旋转
为了找出每个因子的具体意义,更好的解释每个因子的涵义,利用SPSS软件进行因子旋转,这里利用最大化方差法进行因子旋转。

因子得分

4.2 基于回归分析的处理方法
自变量与因变量相关性粗检测

异常值检验
通过上图3 Y与X1的散点矩阵图可知,图中存在异常值,经过查询原始数据,发现69号航点与70号航点因子得分值为11.217478971194932和16.4768940427217,远大于其余航点因子得分值,故要删去该异常值,再进行回归分析。
建立主函数逐步回归模型
 建立了自变量与因变量之间的线性回归模型后,进行回归分析,回归分析方法粗步选择全选法(enter),可以首先根据回归结果分析是否正确,如果选择逐步回归,系统自动将不合适的变量删去,则无法进行对所删变量进行分析,更换变量属性。
建立了自变量与因变量之间的线性回归模型后,进行回归分析,回归分析方法粗步选择全选法(enter),可以首先根据回归结果分析是否正确,如果选择逐步回归,系统自动将不合适的变量删去,则无法进行对所删变量进行分析,更换变量属性。
根据全选法,对回归结果进行分析时,主要分析以下几项:对回归方程的显著性F检验,对回归系数t检验,对残差项进行检验。在进行残差分析时,要考虑到:对回归函数的线性诊断,对误差项独立性检验,对误差项正态性的检验,多重共线性的处理。
本文中在建立了回归主函数模型后,根据全选法分析得出的结果与逐步回归分析方法进行对比,发现模型差异不大,最终采用逐步回归方法,分析结果如下:

回归方程与回归系数显著性检验

回归诊断分析
a.回归函数与误差方差齐性检验

b.自相关检验
在回归模型中我们一般假定误差项是不相关的,如果某个回归模型的误差项不满足这一点,我们就称其存在自相关或序列相关现象,如果模型存在自相关性,那么该模型就没有意义,我们通常用Durbin-Waston检验。
由表得知,该模型的值为2.114在2附近,所以模型不存在一阶自相关。
c.误差正态项检验

d.多重共线性处理

5 回归模型

