论文地址
PER的基本思路跟传统强化学习里面的Prioritized Sweeping基本一样。就是从replay buffer中sample的时候按照优先级sample,优先级用transition 的TD-error来表示。transition 的TD-error越大说明这个需要更好的学习。
但是具体到sample的细节。还是需要注意一下的。
greedy TD-error prioritization
显然就是按照TD-error的大小从小到大选。显然这样是有问题的,后面TD-error小的永远选不到,数据利用效率低。 然后另一个缺点就是不够稳定。TD-error是很noisy的.STOCHASTIC PRIORITIZATION
按照TD-error,按比例依概率选择。\(\alpha\)来调节优先级到底起多少作用。
\[P(i)= \frac{p_i^\alpha}{\sum_k p_k^{\alpha}}\]
\(p_i\)可以是\(|\delta_i|+\epsilon\)(proportional variant);或者是\(\frac{1}{rank(\delta_i)}\) (rank variant)
在replay memory中如果要使用rank variant 来sample
在replay memory中如果要使用proportional variant 来sample
数据结构使用的sum-tree
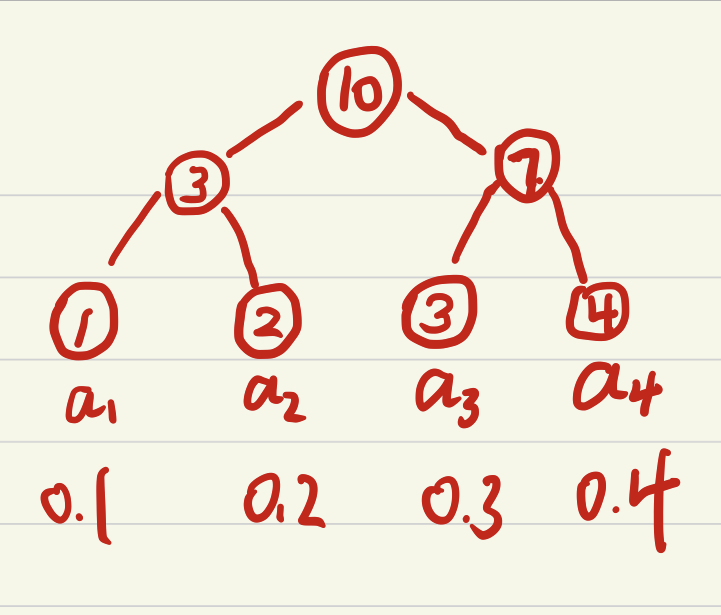
sum-tree提供了一种很优雅的实现按权重sample的方式,数据全部放到叶节点,非叶节点的权重是所有子节点之和。根节点的权重是所有叶子点的和\(P_{all}\),所以从\([0;P_{all}]\)中随机抽取一个权重,然后去sum-tree中找到对应的叶子节点就能够完成一次随机按比例的随机抽样。(找到对应权重\(w\)的叶子节点的规则就是,比左子节点权重\(w_l\)小,去左子节点,比左子节点大,\(w=w-w_l\)然后去右子节点)
事实上按照权重优先级采样打破了数据原本的分布。需要用重采样来修正
\[w_i = (\frac{1}{N}\cdot \frac{1}{P(i)})^{-\beta}\]
相当于\(E_{norm}[x] = E_P[\frac{1}{N} \cdot \frac{1}{P(x)}x]\), \(\beta\)是用来调节修正程度的,初始时不稳定,\(\beta\)小一些,知道最后趋近1. 比如对某这个样本\(P(i)=1\)(不可能),\(w_i\)需要很小,来降低这个样本的影响,\(w_i=N^\beta\)。所以\(\beta\)小,修正大。 实现上\(w_j = w_j /\underset{i}{max}w_i\)来normalize.但是论文里说这个是weighted IS. 有点疑惑?
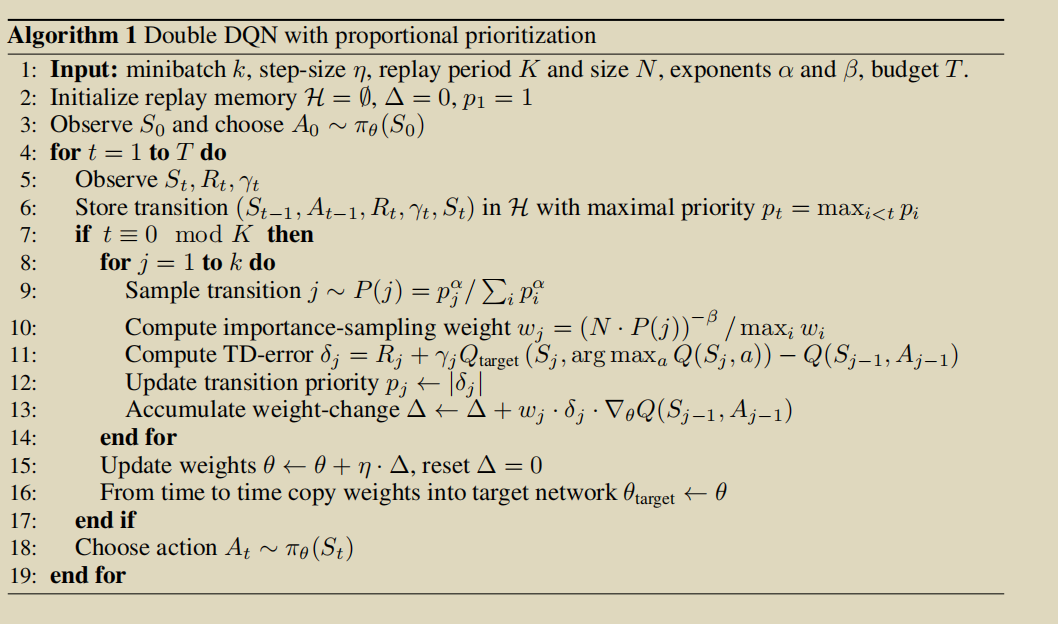
论文中提供的伪代码: