版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
目标检测问题方法
一、目标检测方法的变迁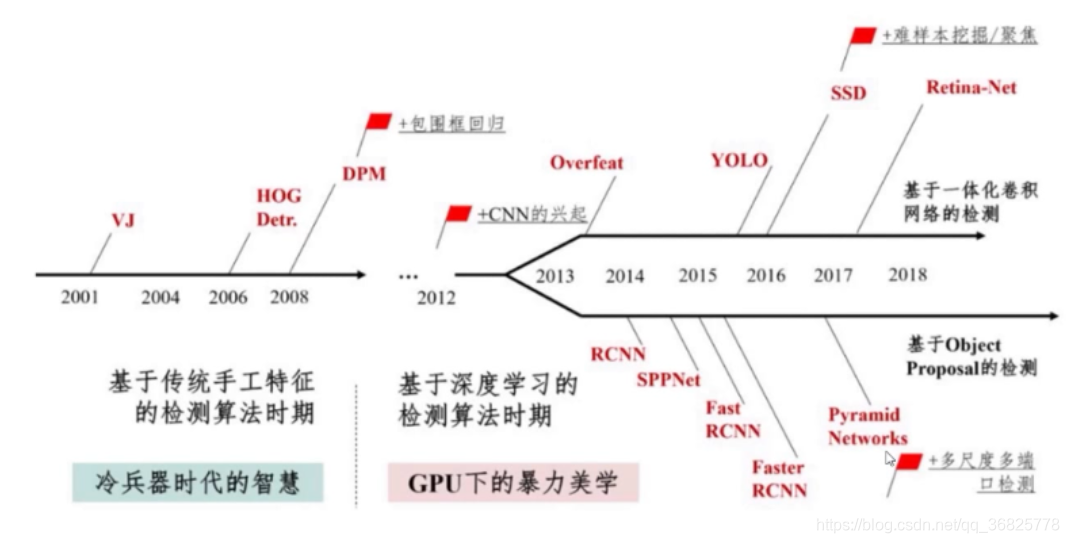
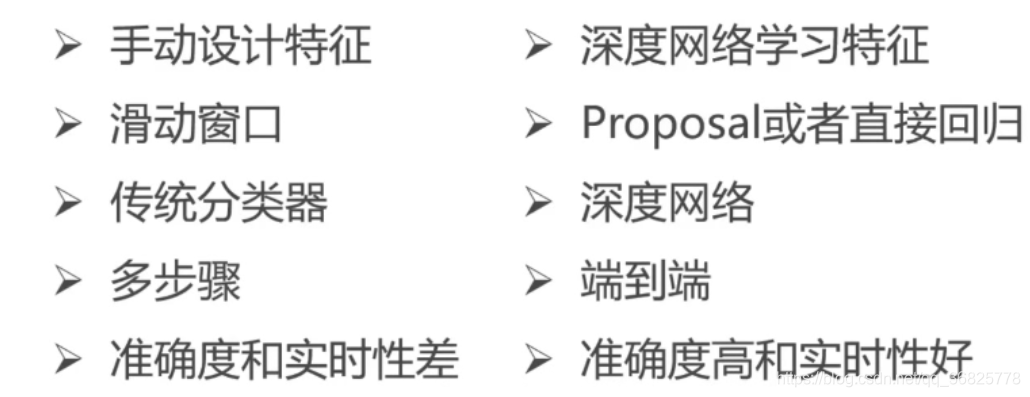
二、 基于传统手工特征的检测算法的问题
1.通过传统方法设置特征,一方面很难设计,另一方面设计出来的特征往往存在各种问题,比如对于某一个特定条件不适应,即不鲁棒,效率低
2.通过滑动窗口的方式来提取目标框,并对目标框进行分类判定的这种策略,在提取滑动窗口时的流程是非常繁琐耗时
深度学习阶段,神经网络可以代替传统手工设计特征并完成目标检测,但这只是利用卷积神经网络来进行特征提取,并没有从本质上改变搜索框提取目标区域的策略,直到Fast RCNN这类方法出现,通过RPN网络来代替原始滑动窗口的策略的提出,打破技术进步的瓶颈
三、算法基本流程
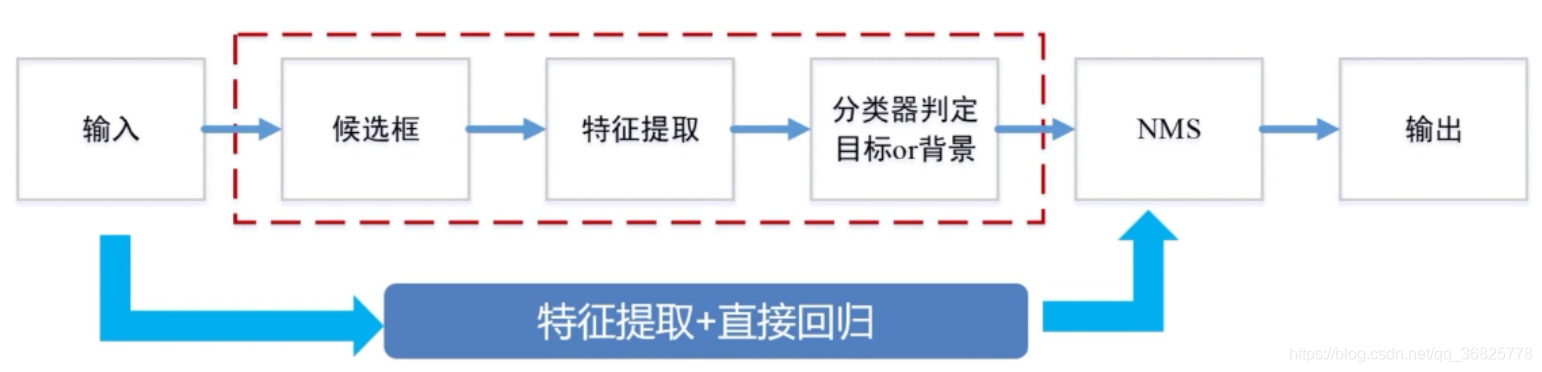
流程一:
给定一张图片作为输入,提取候选框,对候选框进行特征提取并用分类器进行特征判定,最后利用NMS进行候选框的合并,最终得到目标输出结果
流程二:
给定一张图片作为输入,采用特征提取+目标框回归的方法来进行目标区域的提取,最后同样利用NMS进行候选框的合并,最终得到目标输出结果
流程一适用于传统的目标检测方法和基于深度学习的目标检测方法
流程二使用与基于深度学习的目标检测方法
四、传统的目标检测算法
- Viola-Jones(VJ):主要是采用积分图特征结合adaboost分类器来进行人类检测等任务
- HOG+SVM:主要用于行人检测,通过对行人目标候选区域提取HOG特征并结合SVM分类器来进行判定
- DPM:同样基于HOG特征的一种变种,不同点是加入了一些额外策略来提高精度,传统目标检测算法的巅峰之作
- …
五、深度学习目标检测算法
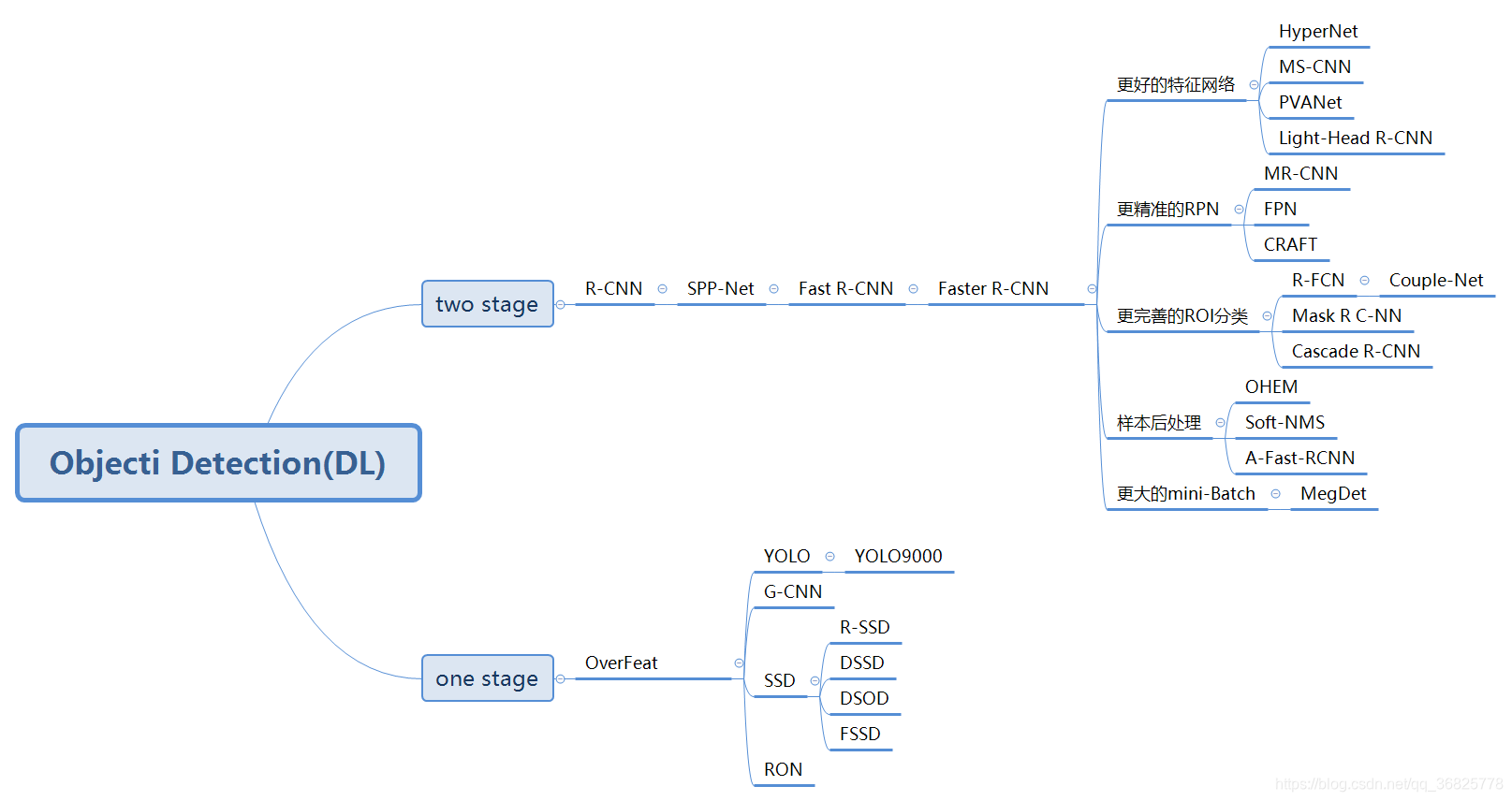
- One-stage(YOLO和SSD系列):通过直接回归目标的位置来进行目标检测和定位
- Two-stage(Faster RCNN系列):通过利用RPN网络来对候选区域进行推荐
六、传统目标检测算法VS深度学习目标检测算法