版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
一.滤波器
1.卡尔曼滤波器
- 卡尔曼滤波器——“最佳线性滤波器”
- 卡尔曼全名Rudolf Emil Kalman,匈牙利数学家,1930年出生于匈牙利首都布达佩斯。1953,1954年于麻省理工学院分别获得电机工程学士及硕士学位。1957年于哥伦比亚大学获得博士学位。卡尔曼滤波器,正是源于他的博士论文和1960年发表的论文《A New Approach to Linear Filtering and Prediction Problems》(线性滤波与预测问题的新方法)。
float kalmanFilter(float *Original_Data)
{
static float prevData=0;
static float p=10, q=0.0001, r=0.005, kGain=0;
p = p+q;
kGain = p/(p+r);
*Original_Data = prevData+(kGain*(*Original_Data-prevData));
p = (1-kGain)*p;
prevData = *Original_Data;
return *Original_Data;
}
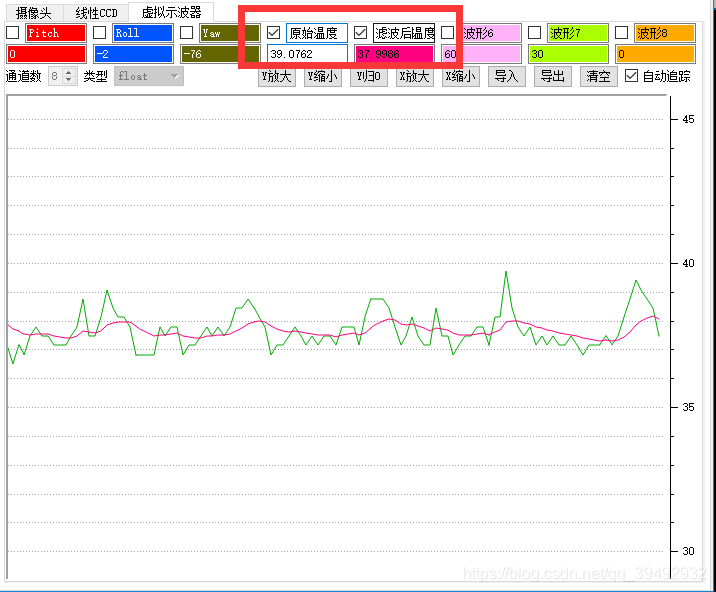
测试效果:
- 绿线为采集到的CPU温度值
- 红线为滤波后CPU的温度值
二、欧拉角
- Roll(翻滚): 欧拉角向量的x轴
- Pitch(俯仰角): 欧拉角向量的y轴
- Yaw(偏航):欧拉角向量的z轴