版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
运动模型和卡尔曼滤波器
在扩展卡尔曼滤波课程中,我们使用了一个等速模型(CV)。等速模型是用于物体跟踪的最基本的运动模型之一。
但是还有很多其他的模型,包括:
恒定转弯率和速度幅度模型(CTRV)
恒定转动率和加速度(CTRA)
恒定转向角和速度(CSAV)
恒定曲率和加速度(CCA)
每个模型对一个物体的运动做出不同的假设。在本节中,主要是使用ctrv模型。
请记住,您可以将这些运动模型中的任何一个与扩展卡尔曼滤波器或无损卡尔曼滤波器一起使用,但我们希望您接触多个运动模型中。
机器人运动与三角学
运动模型的开发依赖于一些基本的三角学概念。
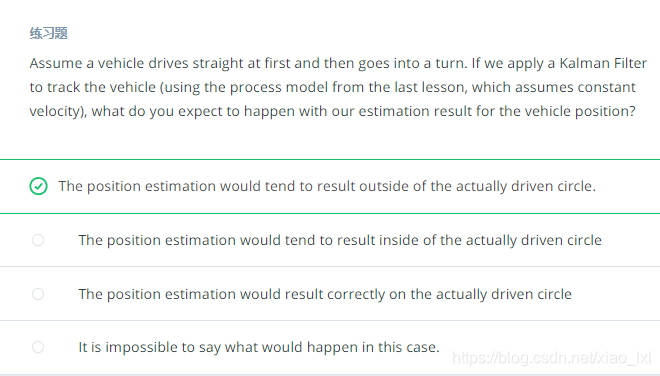
等速(CV)模型(速度是常量的模型)的局限性:
假设速度是常量,我们实际上简化了车辆实际移动的形式,因为大多数车辆道路是有拐弯的,但速度是常量的模型会无法正确预测拐弯车辆。
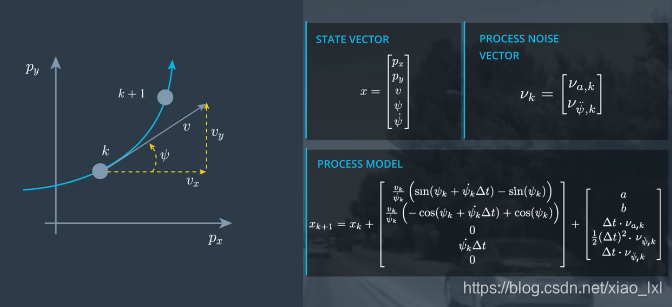
CTRV模型
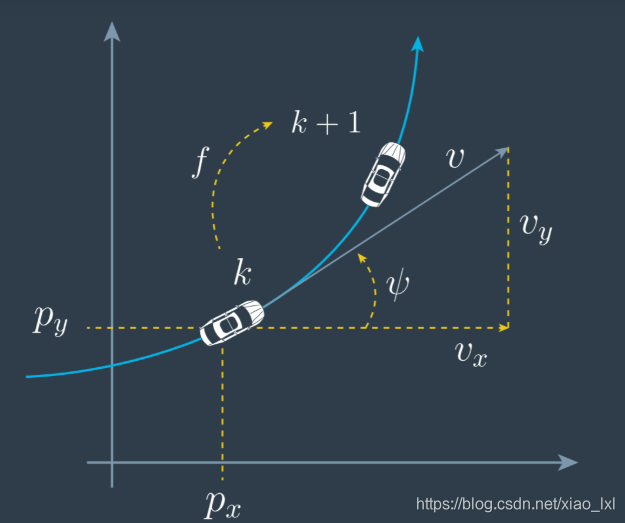
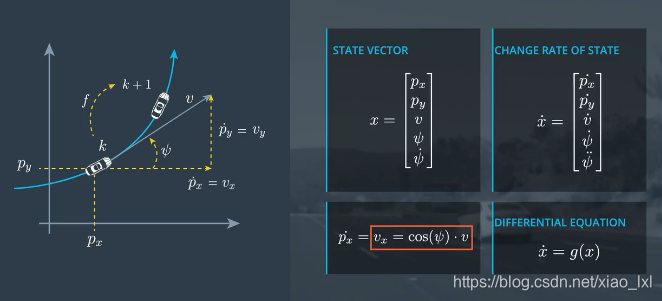
CTRV模型:此模型假设对象沿直线前进,同时还能以固定的转弯速率和恒定的速度大小移动。

其中,px, py表示二维位置;速度大小用v表示;第四个参数是 偏航角,表示方向;第五个参数是估算的角速度。
CTRV差分方程
如果速度不变,其变化率为0。
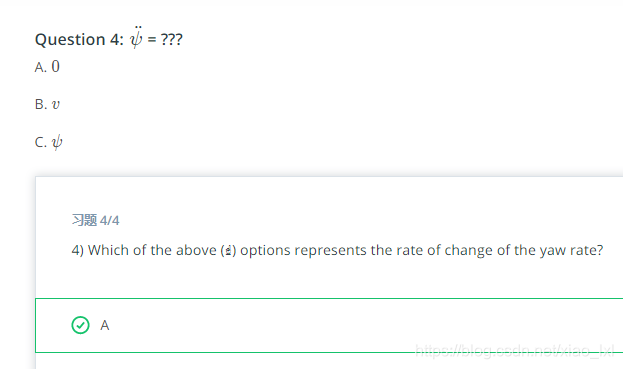
这就是横摆加速度,如果你假设一个恒定的转弯率,就像在ctrv模型中那样,这个加速度是0。
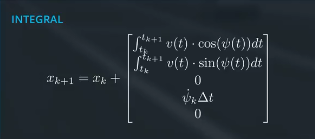
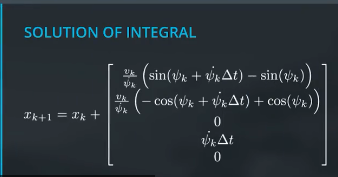
由此,可以得出CTRV完整的差分方程:

CTRV积分
怎么计算时间k到k+1呢?
假设离散的时间步骤k和持续的时间值tk相关,离散的时间步骤k+1和持续的时间值tk+1相关,tk+1可tk之间的时间差叫做delta t.

注意:我们的假设条件是,权重和速度为常量。
对于上图中的两行,必须求解微分。
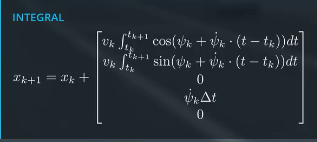
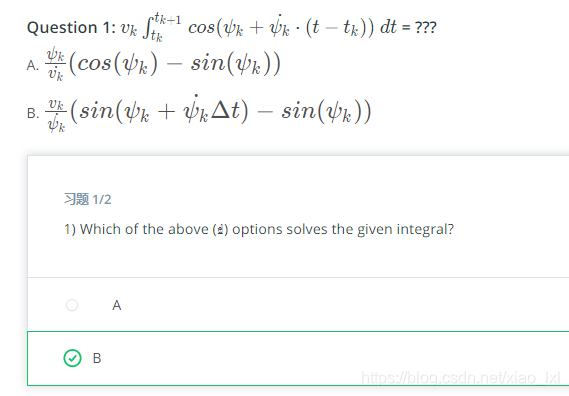
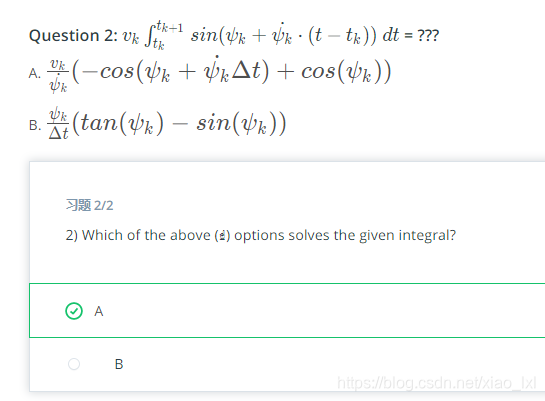
综上,积分解如下:
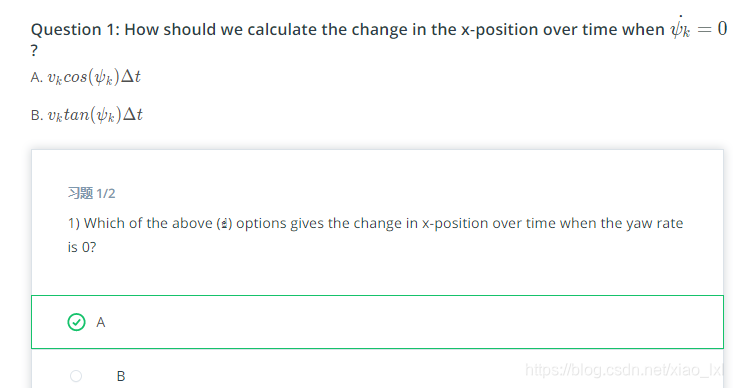
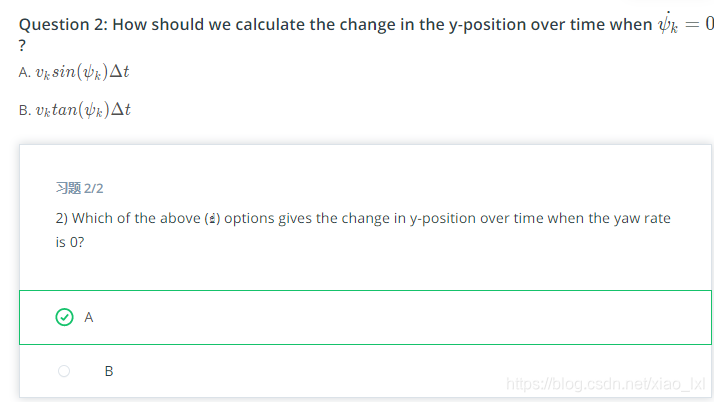
角速度为0时
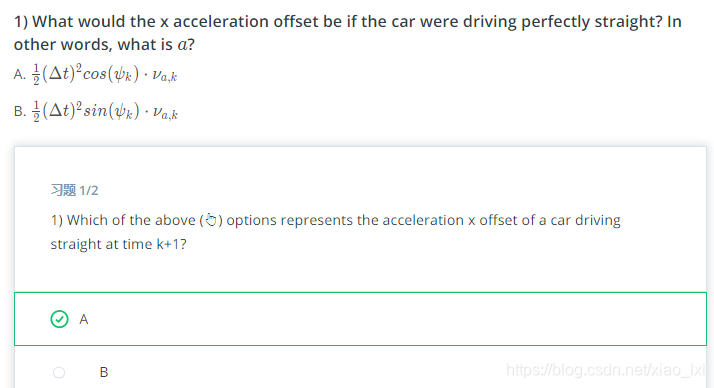
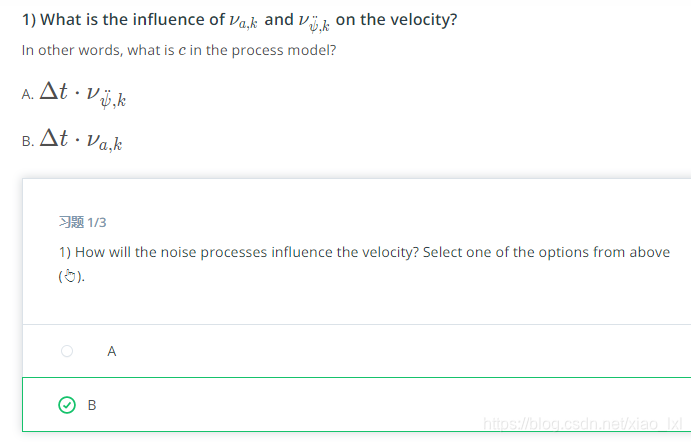
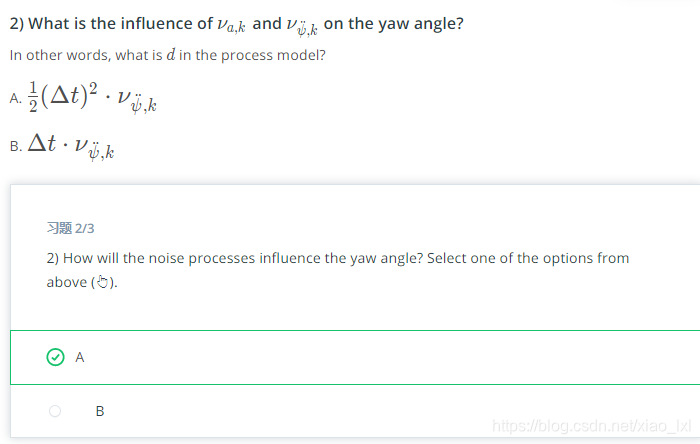
CTRV过程噪声矢量
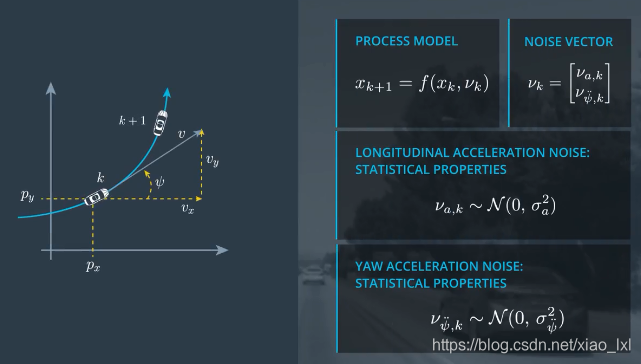
噪声向量对整个过程模型有什么影响?
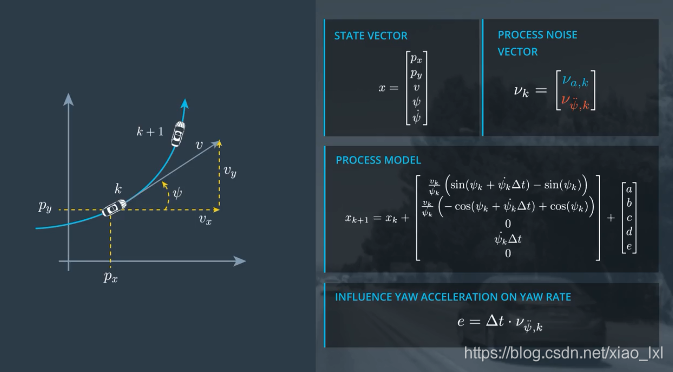
CTRV过程噪声位置