版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
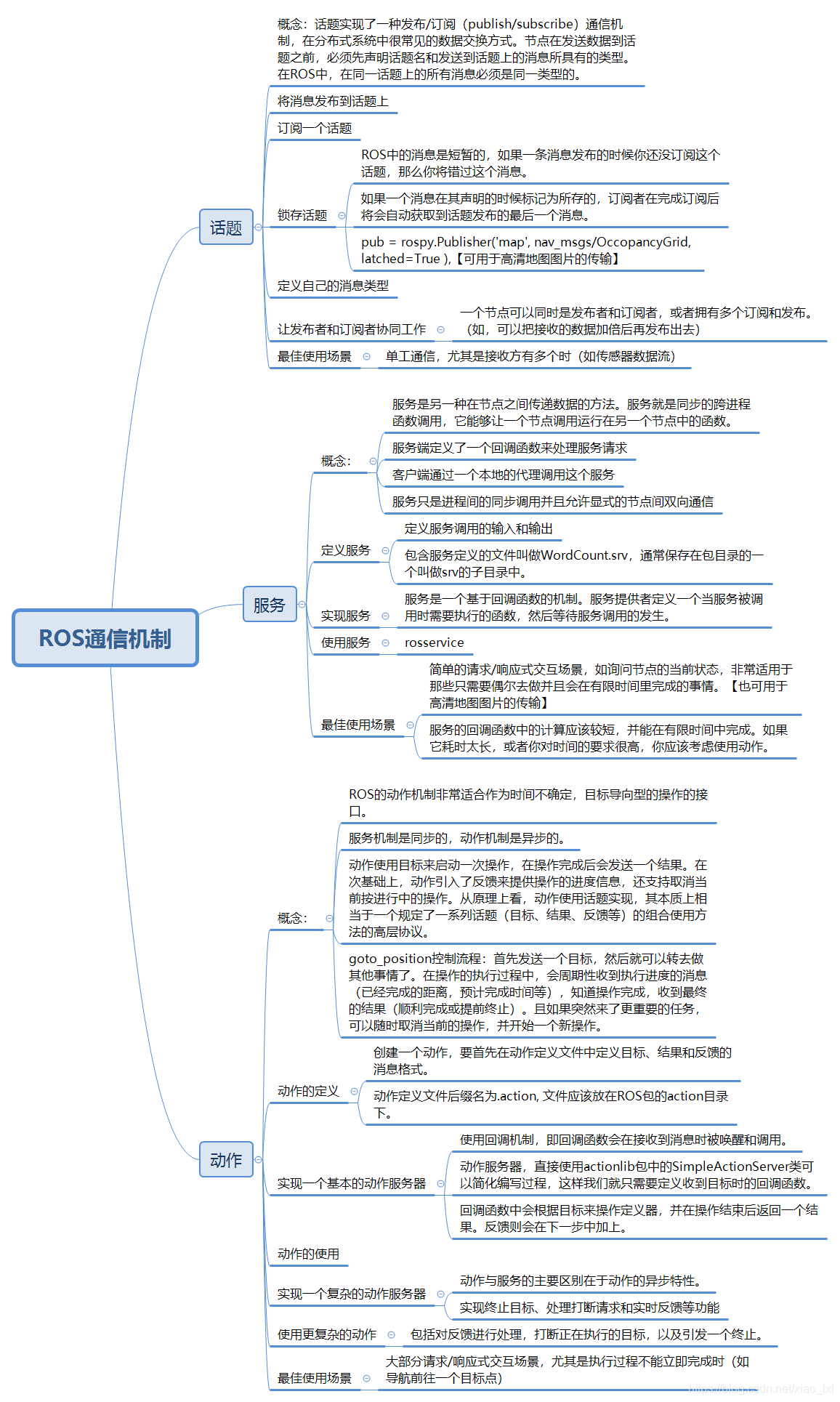
无人驾驶技术——ROS通信机制
猜你喜欢
转载自blog.csdn.net/xiao_lxl/article/details/97015833
今日推荐
周排行