版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/YunLaowang/article/details/86086115
PCL点云库的安装及详细的环境配置可参考如下链接:PCL1.8.1 VS2015 X64系统点云配置经验 ,这里做些补充及作笔记用。
下载对应的版本:https://github.com/PointCloudLibrary/pcl/releases
补充:
安装时,可能会弹出OpenNI2.2SDK安装程序,选择C:\Program Files (x86)\PCL 1.8.1\3rdParty\OpenNI2作为安装目录
系统环境变量
确保系统环境变量中包含如下变量,变量值为PCL对应的安装目录(安装时,选择“Add PCL to the system PATH for all users”即可自动添加)
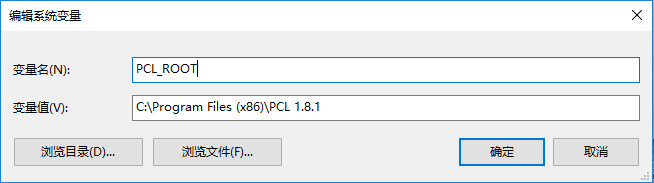
C:\Program Files (x86)\PCL 1.8.1\bin
C:\Program Files (x86)\PCL 1.8.1\3rdParty\FLANN\bin;
C:\Program Files (x86)\PCL 1.8.1\3rdParty\VTK\bin;
C:\Program Files (x86)\PCL 1.8.1\3rdParty\Qhull\bin
C:\Program Files (x86)\PCL 1.8.1\3rdParty\OpenNI2\Tools
VS2015环境配置
- 包含目录
C:\Program Files (x86)\PCL 1.8.1\include\pcl-1.8
C:\Program Files (x86)\PCL 1.8.1\3rdParty\Boost\include\boost-1_64
C:\Program Files (x86)\PCL 1.8.1\3rdParty\FLANN\include
C:\Program Files (x86)\PCL 1.8.1\3rdParty\OpenNI2\Include
C:\Program Files (x86)\PCL 1.8.1\3rdParty\Qhull\include
C:\Program Files (x86)\PCL 1.8.1\3rdParty\VTK\include\vtk-8.0
C:\Program Files (x86)\PCL 1.8.1\3rdParty\Eigen\eigen3
- 库目录
C:\Program Files (x86)\PCL 1.8.1\lib
C:\Program Files (x86)\PCL 1.8.1\3rdParty\Boost\lib
C:\Program Files (x86)\PCL 1.8.1\3rdParty\FLANN\lib
C:\Program Files (x86)\PCL 1.8.1\3rdParty\OpenNI2\Lib
C:\Program Files (x86)\PCL 1.8.1\3rdParty\Qhull\lib
C:\Program Files (x86)\PCL 1.8.1\3rdParty\VTK\lib
- 附加依赖项
Debug版本
pcl_common_debug.lib
pcl_features_debug.lib
pcl_filters_debug.lib
pcl_io_ply_debug.lib
pcl_io_debug.lib
pcl_kdtree_debug.lib
pcl_keypoints_debug.lib
pcl_ml_debug.lib
pcl_octree_debug.lib
pcl_outofcore_debug.lib
pcl_people_debug.lib
pcl_recognition_debug.lib
pcl_registration_debug.lib
pcl_sample_consensus_debug.lib
pcl_search_debug.lib
pcl_segmentation_debug.lib
pcl_stereo_debug.lib
pcl_surface_debug.lib
pcl_tracking_debug.lib
pcl_visualization_debug.lib
libboost_atomic-vc140-mt-gd-1_64.lib
libboost_bzip2-vc140-mt-gd-1_64.lib
libboost_chrono-vc140-mt-gd-1_64.lib
libboost_container-vc140-mt-gd-1_64.lib
libboost_context-vc140-mt-gd-1_64.lib
libboost_coroutine-vc140-mt-gd-1_64.lib
libboost_date_time-vc140-mt-gd-1_64.lib
libboost_exception-vc140-mt-gd-1_64.lib
libboost_fiber-vc140-mt-gd-1_64.lib
libboost_filesystem-vc140-mt-gd-1_64.lib
libboost_graph-vc140-mt-gd-1_64.lib
libboost_graph_parallel-vc140-mt-gd-1_64.lib
libboost_iostreams-vc140-mt-gd-1_64.lib
libboost_locale-vc140-mt-gd-1_64.lib
libboost_log-vc140-mt-gd-1_64.lib
libboost_log_setup-vc140-mt-gd-1_64.lib
libboost_math_c99-vc140-mt-gd-1_64.lib
libboost_math_c99f-vc140-mt-gd-1_64.lib
libboost_math_c99l-vc140-mt-gd-1_64.lib
libboost_math_tr1-vc140-mt-gd-1_64.lib
libboost_math_tr1f-vc140-mt-gd-1_64.lib
libboost_math_tr1l-vc140-mt-gd-1_64.lib
libboost_mpi-vc140-mt-gd-1_64.lib
libboost_numpy3-vc140-mt-gd-1_64.lib
libboost_numpy-vc140-mt-gd-1_64.lib
libboost_prg_exec_monitor-vc140-mt-gd-1_64.lib
libboost_program_options-vc140-mt-gd-1_64.lib
libboost_python3-vc140-mt-gd-1_64.lib
libboost_python-vc140-mt-gd-1_64.lib
libboost_random-vc140-mt-gd-1_64.lib
libboost_regex-vc140-mt-gd-1_64.lib
libboost_serialization-vc140-mt-gd-1_64.lib
libboost_signals-vc140-mt-gd-1_64.lib
libboost_system-vc140-mt-gd-1_64.lib
libboost_test_exec_monitor-vc140-mt-gd-1_64.lib
libboost_thread-vc140-mt-gd-1_64.lib
libboost_timer-vc140-mt-gd-1_64.lib
libboost_type_erasure-vc140-mt-gd-1_64.lib
libboost_unit_test_framework-vc140-mt-gd-1_64.lib
libboost_wave-vc140-mt-gd-1_64.lib
libboost_wserialization-vc140-mt-gd-1_64.lib
libboost_zlib-vc140-mt-gd-1_64.lib
flann-gd.lib
flann_cpp-gd.lib
flann_cpp_s-gd.lib
flann_s-gd.lib
qhull_d.lib
qhullcpp_d.lib
qhullstatic_d.lib
qhullstatic_r_d.lib
qhull_p_d.lib
qhull_r_d.lib
vtkalglib-8.0-gd.lib
vtkChartsCore-8.0-gd.lib
vtkCommonColor-8.0-gd.lib
vtkCommonComputationalGeometry-8.0-gd.lib
vtkCommonCore-8.0-gd.lib
vtkCommonDataModel-8.0-gd.lib
vtkCommonExecutionModel-8.0-gd.lib
vtkCommonMath-8.0-gd.lib
vtkCommonMisc-8.0-gd.lib
vtkCommonSystem-8.0-gd.lib
vtkCommonTransforms-8.0-gd.lib
vtkDICOMParser-8.0-gd.lib
vtkDomainsChemistry-8.0-gd.lib
vtkexoIIc-8.0-gd.lib
vtkexpat-8.0-gd.lib
vtkFiltersAMR-8.0-gd.lib
vtkFiltersCore-8.0-gd.lib
vtkFiltersExtraction-8.0-gd.lib
vtkFiltersFlowPaths-8.0-gd.lib
vtkFiltersGeneral-8.0-gd.lib
vtkFiltersGeneric-8.0-gd.lib
vtkFiltersGeometry-8.0-gd.lib
vtkFiltersHybrid-8.0-gd.lib
vtkFiltersHyperTree-8.0-gd.lib
vtkFiltersImaging-8.0-gd.lib
vtkFiltersModeling-8.0-gd.lib
vtkFiltersParallel-8.0-gd.lib
vtkFiltersParallelImaging-8.0-gd.lib
vtkFiltersPoints-8.0-gd.lib
vtkFiltersProgrammable-8.0-gd.lib
vtkFiltersSelection-8.0-gd.lib
vtkFiltersSMP-8.0-gd.lib
vtkFiltersSources-8.0-gd.lib
vtkFiltersStatistics-8.0-gd.lib
vtkFiltersTexture-8.0-gd.lib
vtkFiltersTopology-8.0-gd.lib
vtkFiltersVerdict-8.0-gd.lib
vtkfreetype-8.0-gd.lib
vtkGeovisCore-8.0-gd.lib
vtkgl2ps-8.0-gd.lib
vtkhdf5-8.0-gd.lib
vtkhdf5_hl-8.0-gd.lib
vtkImagingColor-8.0-gd.lib
vtkImagingCore-8.0-gd.lib
vtkImagingFourier-8.0-gd.lib
vtkImagingGeneral-8.0-gd.lib
vtkImagingHybrid-8.0-gd.lib
vtkImagingMath-8.0-gd.lib
vtkImagingMorphological-8.0-gd.lib
vtkImagingSources-8.0-gd.lib
vtkImagingStatistics-8.0-gd.lib
vtkImagingStencil-8.0-gd.lib
vtkInfovisCore-8.0-gd.lib
vtkInfovisLayout-8.0-gd.lib
vtkInteractionImage-8.0-gd.lib
vtkInteractionStyle-8.0-gd.lib
vtkInteractionWidgets-8.0-gd.lib
vtkIOAMR-8.0-gd.lib
vtkIOCore-8.0-gd.lib
vtkIOEnSight-8.0-gd.lib
vtkIOExodus-8.0-gd.lib
vtkIOExport-8.0-gd.lib
vtkIOExportOpenGL-8.0-gd.lib
vtkIOGeometry-8.0-gd.lib
vtkIOImage-8.0-gd.lib
vtkIOImport-8.0-gd.lib
vtkIOInfovis-8.0-gd.lib
vtkIOLegacy-8.0-gd.lib
vtkIOLSDyna-8.0-gd.lib
vtkIOMINC-8.0-gd.lib
vtkIOMovie-8.0-gd.lib
vtkIONetCDF-8.0-gd.lib
vtkIOParallel-8.0-gd.lib
vtkIOParallelXML-8.0-gd.lib
vtkIOPLY-8.0-gd.lib
vtkIOSQL-8.0-gd.lib
vtkIOTecplotTable-8.0-gd.lib
vtkIOVideo-8.0-gd.lib
vtkIOXML-8.0-gd.lib
vtkIOXMLParser-8.0-gd.lib
vtkjpeg-8.0-gd.lib
vtkjsoncpp-8.0-gd.lib
vtklibharu-8.0-gd.lib
vtklibxml2-8.0-gd.lib
vtklz4-8.0-gd.lib
vtkmetaio-8.0-gd.lib
vtknetcdf_c++-gd.lib
vtkNetCDF-8.0-gd.lib
vtkoggtheora-8.0-gd.lib
vtkParallelCore-8.0-gd.lib
vtkpng-8.0-gd.lib
vtkproj4-8.0-gd.lib
vtkRenderingAnnotation-8.0-gd.lib
vtkRenderingContext2D-8.0-gd.lib
vtkRenderingContextOpenGL-8.0-gd.lib
vtkRenderingCore-8.0-gd.lib
vtkRenderingFreeType-8.0-gd.lib
vtkRenderingGL2PS-8.0-gd.lib
vtkRenderingImage-8.0-gd.lib
vtkRenderingLabel-8.0-gd.lib
vtkRenderingLIC-8.0-gd.lib
vtkRenderingLOD-8.0-gd.lib
vtkRenderingOpenGL-8.0-gd.lib
vtkRenderingVolume-8.0-gd.lib
vtkRenderingVolumeOpenGL-8.0-gd.lib
vtksqlite-8.0-gd.lib
vtksys-8.0-gd.lib
vtktiff-8.0-gd.lib
vtkverdict-8.0-gd.lib
vtkViewsContext2D-8.0-gd.lib
vtkViewsCore-8.0-gd.lib
vtkViewsInfovis-8.0-gd.lib
vtkzlib-8.0-gd.lib
opengl32.lib
Release版本:
根据C:\Program Files (x86)\PCL 1.8.1\3rdParty(安装目录)下不同的组件对应的格式修改即可(复制到word内,一键替换即可:“debug"替换成"release”,"-gd"替换成空)。
测试
配置好环境后,记得【重启VS】,否则可能出现如下错误:

- 测试代码
新建main.cpp文件,复制并执行如下代码,进行测试:
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/ModelCoefficients.h>
#include <pcl/filters/project_inliers.h>
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_projected(new pcl::PointCloud<pcl::PointXYZ>);
// Fill in the cloud data
cloud->width = 5;
cloud->height = 1;
cloud->points.resize(cloud->width * cloud->height);
for (size_t i = 0; i < cloud->points.size(); ++i)
{
cloud->points[i].x = 1024 * rand() / (RAND_MAX + 1.0f);
cloud->points[i].y = 1024 * rand() / (RAND_MAX + 1.0f);
cloud->points[i].z = 1024 * rand() / (RAND_MAX + 1.0f);
}
std::cerr << "Cloud before projection: " << std::endl;
for (size_t i = 0; i < cloud->points.size(); ++i)
std::cerr << " " << cloud->points[i].x << " "
<< cloud->points[i].y << " "
<< cloud->points[i].z << std::endl;
// Create a set of planar coefficients with X=Y=0,Z=1
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients());
coefficients->values.resize(4);
coefficients->values[0] = coefficients->values[1] = 0;
coefficients->values[2] = 1.0;
coefficients->values[3] = 0;
// Create the filtering object
pcl::ProjectInliers<pcl::PointXYZ> proj;
proj.setModelType(pcl::SACMODEL_PLANE);
proj.setInputCloud(cloud);
proj.setModelCoefficients(coefficients);
proj.filter(*cloud_projected);
std::cerr << "Cloud after projection: " << std::endl;
for (size_t i = 0; i < cloud_projected->points.size(); ++i)
std::cerr << " " << cloud_projected->points[i].x << " "
<< cloud_projected->points[i].y << " "
<< cloud_projected->points[i].z << std::endl;
system("pause");
return (0);
}
- 结果:
如生成如下结果,则环境配置成功。

若出现如下错误:

只需在【项目–>属性–>C/C++ -->预处理器–>预处理器定义】中添加如下定义即可:
_SCL_SECURE_NO_WARNINGS