版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/rongdongzhu1/article/details/89917366
平面上任意椭圆与点的位置关系
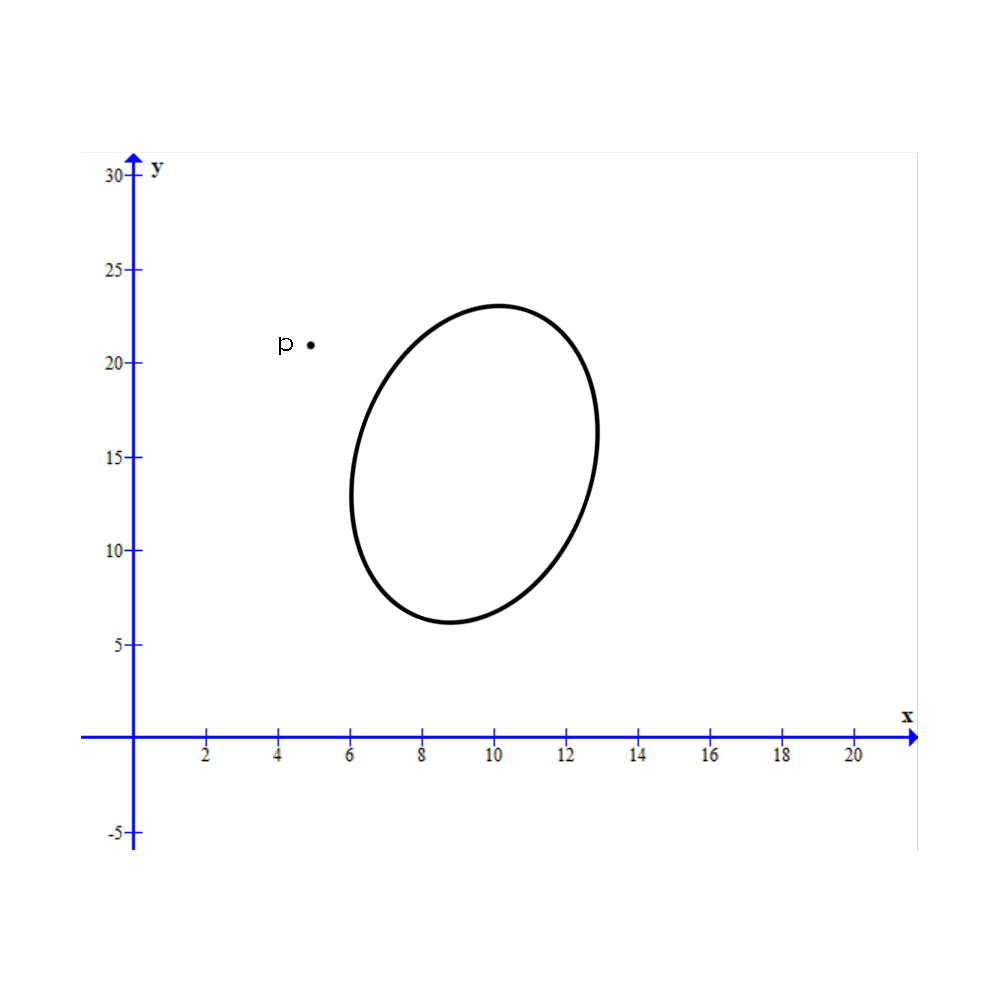
问题描述 : 如上图所示,我们的目的是判断在二维空间中任意一椭圆与任意一点
pi(xi,yi)的位置关系,这样的位置关系有三种 : 1 点在椭圆上; 2 点在椭圆中; 3 点在椭圆外。
解决思路 :
从最简单的开始讲起, 在初中时候学到过,对于一个焦点在
x轴或
y轴的椭圆来讲有标准方程 :
a2x2+b2y2=1
或者
a2y2+b2x2=1
利用标准方程,判断点与椭圆的位置关系十分容易,以焦点在
x轴上的椭圆为例,
∀p(xi,yi)∈R2,这里不加证明的给出位置关系的判别式 :
(1) 若
a2xi2+b2yi2<1
点在椭圆内;
(2) 若
a2xi2+b2yi2=1
点在椭圆上;
(3) 若
a2xi2+b2yi2>1
点在椭圆外。
这一块证明的资料很多,在此就不再赘述了。
现在将问题泛化 : 对于任意的一个椭圆如何求其与点
pi的关系。根据上面的结论我们可以很自然的思考,如果通过一种坐标系的变换,将任意的椭圆都变为焦点在
x轴,或
y轴的椭圆,那么其与点
pi位置关系的判断将是十分容易,只需要带入已知公式即可,根据这样的思路,我们建立如下坐标系。
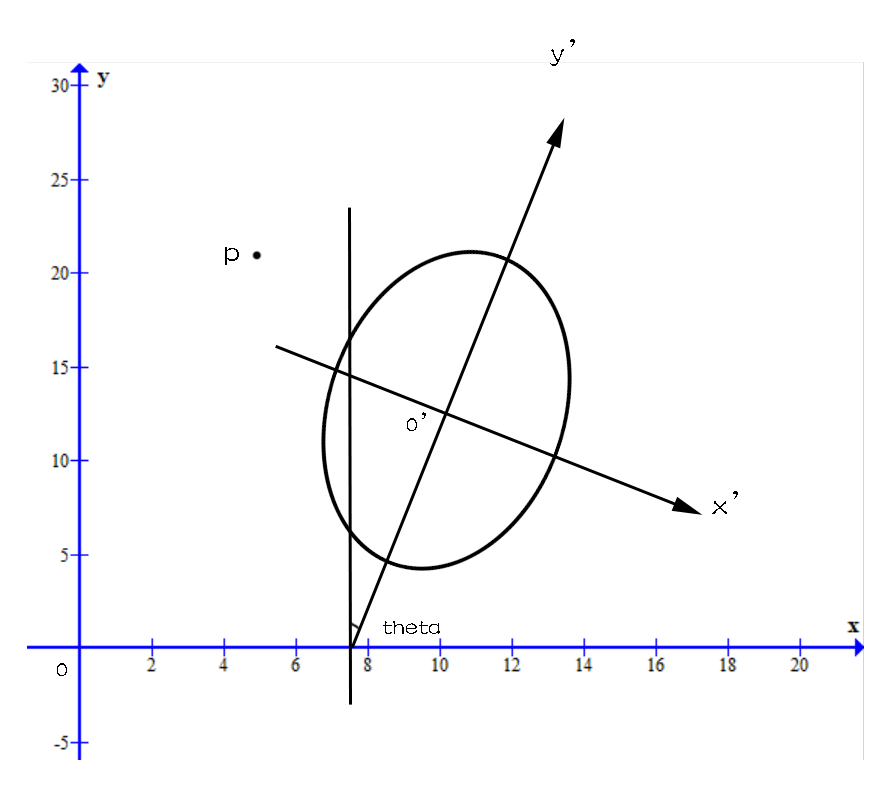
如上图所示,在新的坐标系
x′0′y′中,椭圆的焦点处于坐标轴上,可以使用椭圆的标准方程进行求解,唯一的问题是如何将任给一点
pi变换到
x′0′y′,证明的方式有很多种,在此选用基变换.
下述方法中,变换后向量的起点
0′的坐标是
(x0,y0)点,为了满足这个条件,首先对
pi进行简单的平移变换,
xi=xi−x0yi=yi−y0
注 :
(x0,y0) 是椭圆圆心坐标.
求解 :
在原始坐标系
x0y中选取一组单位正交基
{e1
,e2
},e1
=(1,0),e2
=(0,1),显然
pi
=xie1
+yie2
.
如上图先将
e1
,e2
旋转
θ角,根据向量旋转公式:
(e1′
)T=[cos(θ)sin(θ)−sin(θ)cos(θ)]⋅[10](e2′
)T=[cos(θ)sin(θ)−sin(θ)cos(θ)]⋅[01]
综上
e1′
=(cosθ,sinθ),e2′
=(−sinθ,cosθ), 显然其满足这几点 :
(1)
e1′
,e2′
线性无关
(2)
e1′
⋅e2′
=0
(3)
∣∣∣e1′
∣∣∣=∣∣∣e2′
∣∣∣=1
以上通过旋转矩阵求出了新坐标系下的一组正交基,下面只需要求
pi
在新的基下的表示即可,解法有多种,下面展示一种通过求过度矩阵来进行求解的方法 :
将
e1′
,e2′
通过
e2
,e2
进行表示 :
e1′
=cosθ⋅e1
+sinθ⋅e2
e2′
=−sinθ⋅e1
+cosθ⋅e2
由上可以求出过渡矩阵
C=[cos(θ)sin(θ)−sin(θ)cos(θ)]
所以
e1
,e2
到
e1′
,e2′
的坐标变换表示为 :
[xi′yi′]=C−1⋅[xiyi]
整理可以得到 :
x′=cosθ⋅x+sinθ⋅yy′=−sinθ⋅x+cosθ⋅y
上述关系式还可以通过向量间的投影关系得到.
最后将变换后的
(xi′,yi′)带入判别式,计算即可。