使用C++、opencv进行工地环境下,钢管数量的检测
相关重要API:
void HoughCircles(InputArray image,OutputArray circles, int method, double dp, double minDist, double param1=100,double param2=100, int minRadius=0, int maxRadius=0)
第一个参数,InputArray类型的image,输入图像,即源图像,需为8位的灰度单通道图像。
第二个参数,InputArray类型的circles,经过调用HoughCircles函数后此参数存储了检测到的圆的输出矢量,每个矢量由包含了3个元素的浮点矢量(x, y, radius)表示。
第三个参数,int类型的method,即使用的检测方法,目前OpenCV中就霍夫梯度法一种可以使用,它的标识符为CV_HOUGH_GRADIENT,在此参数处填这个标识符即可。
第四个参数,double类型的dp,用来检测圆心的累加器图像的分辨率于输入图像之比的倒数,且此参数允许创建一个比输入图像分辨率低的累加器。上述文字不好理解的话,来看例子吧。例如,如果dp= 1时,累加器和输入图像具有相同的分辨率。如果dp=2,累加器便有输入图像一半那么大的宽度和高度。
第五个参数,double类型的minDist,为霍夫变换检测到的圆的圆心之间的最小距离,即让我们的算法能明显区分的两个不同圆之间的最小距离。这个参数如果太小的话,多个相邻的圆可能被错误地检测成了一个重合的圆。反之,这个参数设置太大的话,某些圆就不能被检测出来了。
第六个参数,double类型的param1,有默认值100。它是第三个参数method设置的检测方法的对应的参数。对当前唯一的方法霍夫梯度法CV_HOUGH_GRADIENT,它表示传递给canny边缘检测算子的高阈值,而低阈值为高阈值的一半。
第七个参数,double类型的param2,也有默认值100。它是第三个参数method设置的检测方法的对应的参数。对当前唯一的方法霍夫梯度法CV_HOUGH_GRADIENT,它表示在检测阶段圆心的累加器阈值。它越小的话,就可以检测到更多根本不存在的圆,而它越大的话,能通过检测的圆就更加接近完美的圆形了。
第八个参数,int类型的minRadius,有默认值0,表示圆半径的最小值。
第九个参数,int类型的maxRadius,也有默认值0,表示圆半径的最大值。
需要注意的是,使用此函数可以很容易地检测出圆的圆心,但是它可能找不到合适的圆半径
----------------------------------------------------------------------------------------
void circle(CV_IN_OUT Mat& img, Point center, int radius, const Scalar& color, int thickness=1, int lineType=8, int shift=0);
img为图像,单通道多通道都行,不需要特殊要求
center为画圆的圆心坐标
radius为圆的半径
color为设定圆的颜色,比如用CV_RGB(255, 0,0)设置为红色, CV_RGB(255, 255,255)设置为白色,CV_RGB(0, 0,0)设置为黑色
thickness为设置圆线条的粗细,值越大则线条越粗,为负数则是填充效果
lineType为线型,有默认值8,代表8联通型;
-----------------------------------------------------------------------------
代码如下:
#include "stdafx.h"
#include <opencv2\core\core.hpp>
#include <opencv2\imgproc\imgproc.hpp>
#include <opencv2\highgui\highgui.hpp>
using namespace cv;
//定义全局变量
Mat src, blurimg, grayimg,cannyimage;//源图像,模糊后图像,灰度图像,canny边缘检测后图像
int centerdist, cannyvalue, roundness, minradius, maxradius;//霍夫圆变换的参数
//滑动条回调函数
void on_centerdist(int, void*);
void on_cannyvalue(int, void*);
void on_roundness(int, void*);
void on_minradius(int, void*);
void on_maxradius(int, void*);
//存储圆轮廓
std::vector<Vec3f> circles;
int main()
{
system("color 02");
//霍夫圆变幻的参数初始值
centerdist = 10;
cannyvalue = 100;
roundness = 30;
minradius = 15;
maxradius = 50;
namedWindow("canny", WINDOW_AUTOSIZE);
namedWindow("dst", WINDOW_AUTOSIZE);
//创建各个参数的滑动条
createTrackbar("cannyvalue", "canny", &cannyvalue, 300, on_cannyvalue);
on_cannyvalue(0, 0);
createTrackbar("centdist", "dst", ¢erdist, 100, on_centerdist);
on_centerdist(0, 0);
createTrackbar("roundness", "dst", &roundness, 100, on_roundness);
on_roundness(0, 0);
createTrackbar("minradius", "dst", &minradius, 100, on_minradius);
on_minradius(0, 0);
createTrackbar("maxradius", "dst", &maxradius, 300, on_maxradius);
on_maxradius(0, 0);
waitKey();
return 0;
}
//cannyvalue,centerdist,roundness, minradius, maxradius;
void on_cannyvalue(int, void*)
{
//读入源图
src = imread("../2.jpg");
//使用高斯滤波模糊图像
GaussianBlur(src, blurimg, Size(3, 3), 0);
//namedWindow("canny", WINDOW_AUTOSIZE);
//imshow("canny", blurimg);
//转化为灰度图
cvtColor(src, grayimg, COLOR_BGR2GRAY);
//Canny算子
Canny(grayimg, cannyimage, cannyvalue / 2, cannyvalue, 3);
//膨胀操作
Mat element = getStructuringElement(MORPH_ELLIPSE, Size(3, 3));
morphologyEx(cannyimage, cannyimage, MORPH_DILATE, element);
//显示效果图
imshow("canny", cannyimage);
}
void on_centerdist(int, void*)
{
src = imread("../2.jpg");
//清空原来轮廓
circles.clear();
//霍夫圆变换,寻找圆
HoughCircles(cannyimage, circles, HOUGH_GRADIENT, 1, centerdist, cannyvalue, roundness, minradius, maxradius);
//画出找到的圆
for (size_t i = 0; i < circles.size(); i++)
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
//circle(src, center, 3, Scalar(0, 255, 0), 1, 8, 0);
circle(src, center, radius, Scalar(0, 0, 255), 2, 8, 0);
}
//左上角显示找到的圆的个数,即钢管数量
putText(src, std::to_string((unsigned int)circles.size()), Point(1, 25), FONT_HERSHEY_COMPLEX, 1, Scalar(0, 255, 255), 2, 8);
imshow("dst", src);
}
void on_roundness(int, void*)
{
src = imread("../2.jpg");
circles.clear();
HoughCircles(cannyimage, circles, HOUGH_GRADIENT, 1, centerdist, cannyvalue, roundness, minradius, maxradius);
for (size_t i = 0; i < circles.size(); i++)
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
//circle(src, center, 3, Scalar(0, 255, 0), 1, 8, 0);
circle(src, center, radius, Scalar(0, 0, 255), 2, 8, 0);
}
putText(src, std::to_string((unsigned int)circles.size()), Point(1, 25), FONT_HERSHEY_COMPLEX, 1, Scalar(0, 255, 255), 2, 8);
imshow("dst", src);
}
void on_minradius(int, void*)
{
src = imread("../2.jpg");
circles.clear();
HoughCircles(cannyimage, circles, HOUGH_GRADIENT, 1, centerdist, cannyvalue, roundness, minradius, maxradius);
for (size_t i = 0; i < circles.size(); i++)
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
//circle(src, center, 3, Scalar(0, 255, 0), 1, 8, 0);
circle(src, center, radius, Scalar(0, 0, 255), 2, 8, 0);
}
putText(src, std::to_string((unsigned int)circles.size()), Point(1, 25), FONT_HERSHEY_COMPLEX, 1, Scalar(0, 255, 255), 2, 8);
imshow("dst", src);
}
void on_maxradius(int, void*)
{
src = imread("../2.jpg");
circles.clear();
HoughCircles(cannyimage, circles, HOUGH_GRADIENT, 1, centerdist, cannyvalue, roundness, minradius, maxradius);
for (size_t i = 0; i < circles.size(); i++)
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
//circle(src, center, 3, Scalar(0, 255, 0), 1, 8, 0);
circle(src, center, radius, Scalar(0, 0, 255), 2, 8, 0);
}
putText(src, std::to_string((unsigned int)circles.size()), Point(1, 25), FONT_HERSHEY_COMPLEX, 1, Scalar(0, 255, 255), 2, 8);
imshow("dst", src);
}源图像:

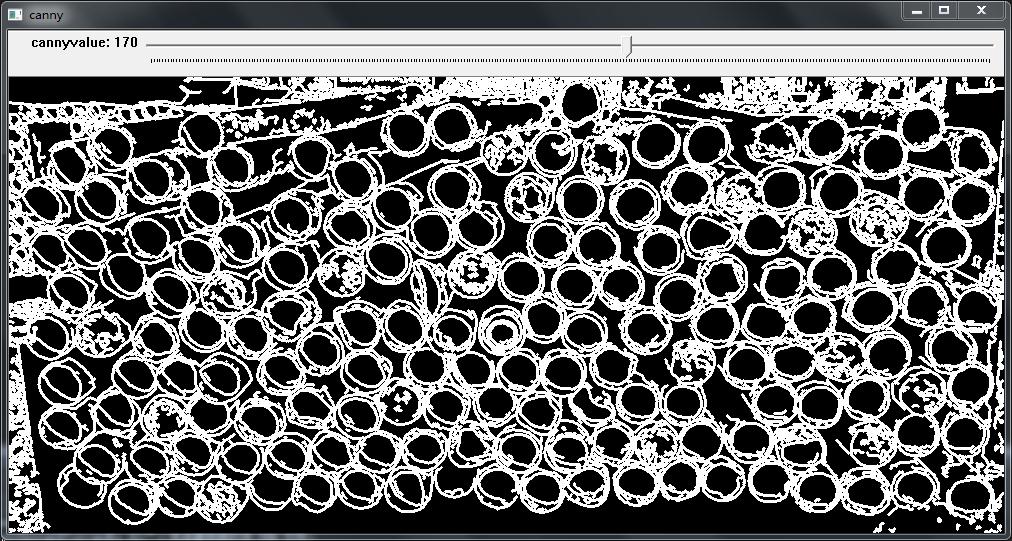
canny边缘检测图像:
霍夫圆变换找到的圆:

可以看到,基本上都找到了,粗看一下少数了4根,应该可以通过调节canny的阈值,和霍夫变换的参数达到更好的效果。
部分参考:毛星云 《OpenCV3编程入门》