基础原理:注意这种分解的安装方式,共有4种安装方式
转自:https://blog.csdn.net/zhaoyuaiweide/article/details/75560257

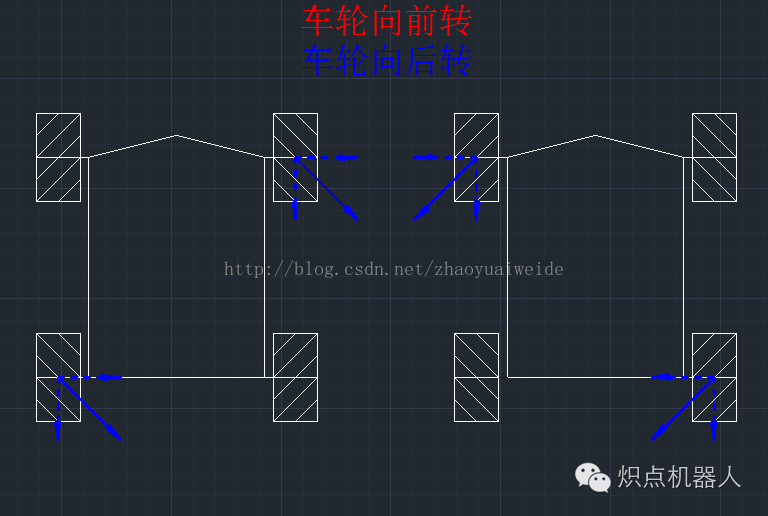
我们来画个受力示意图吧
先来看看前后移动
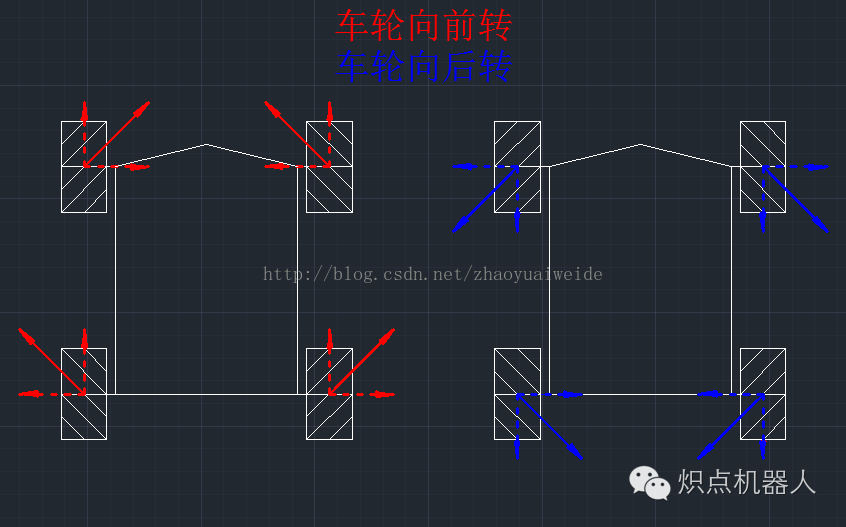
图中红色实线箭头是车轮向前转产生的摩擦力
蓝色箭头是车轮向后转产生的摩擦力
虚线是分力
于是左边的小车就会向前跑,右边的小车会向后跑
接下来我们画原地旋转
于是左边的小车就顺时针旋转
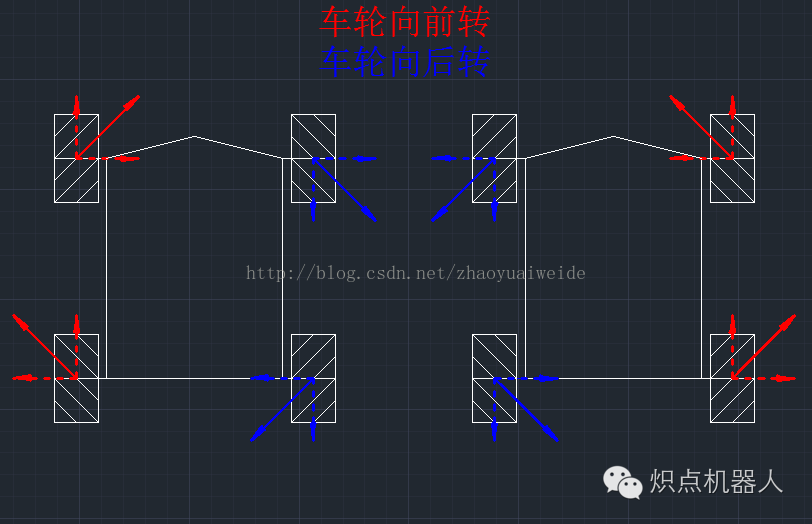
右边的小车逆时针旋转
让我们再来看看平移
左边的小车向左平移
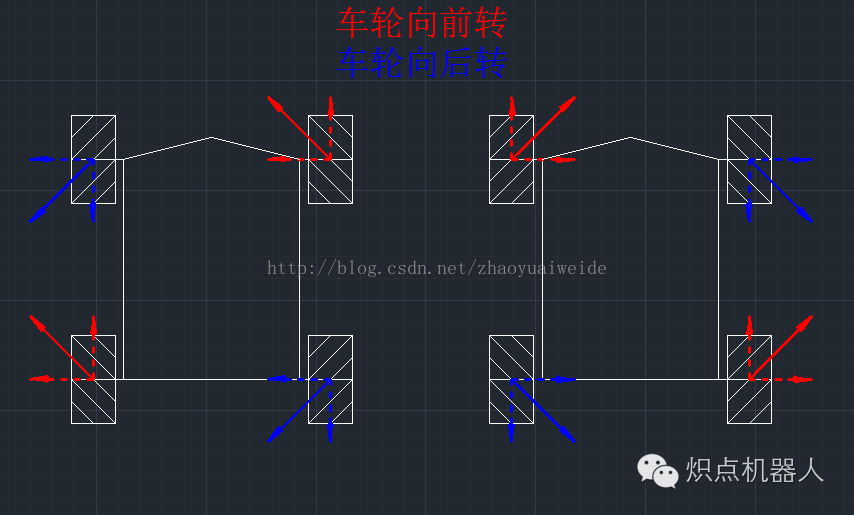
右边的小车向右平移
接下来看看斜着跑
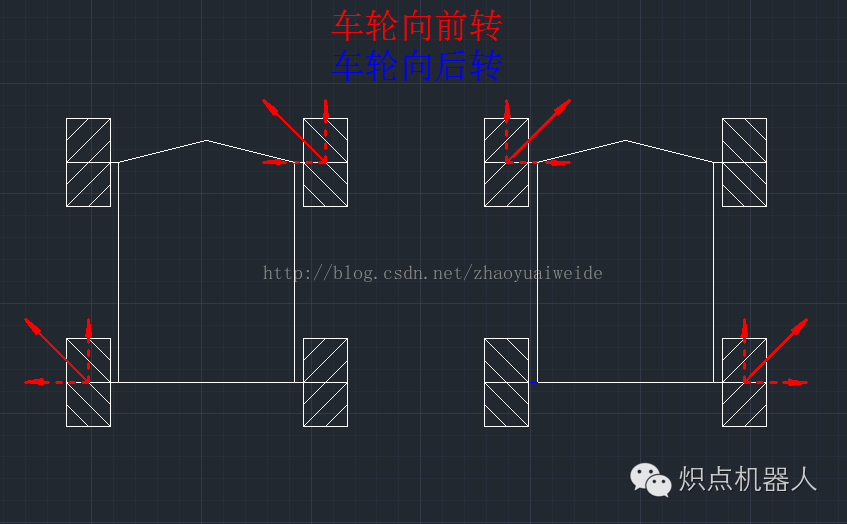
只要同向转动对角线上两个轮子,
就能斜着跑啦
运动学分解:
参考https://bbs.robomaster.com/thread-3960-1-1.html
速度分解计算:
参考https://blog.csdn.net/banzhuan133/article/details/69229922
里程计:
参考https://blog.csdn.net/ethan_guo/article/details/82781179
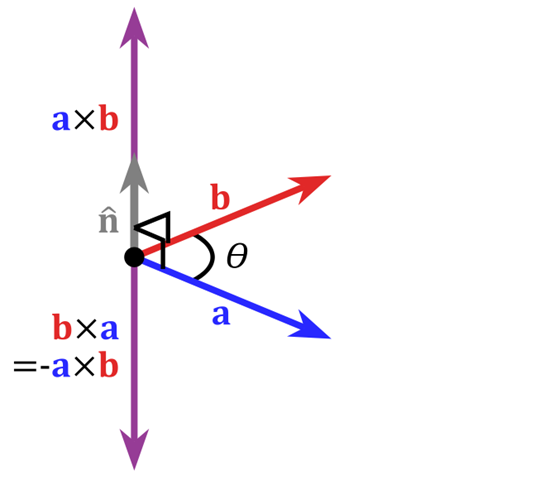
向量点乘和叉乘:转自https://blog.csdn.net/dcrmg/article/details/52416832
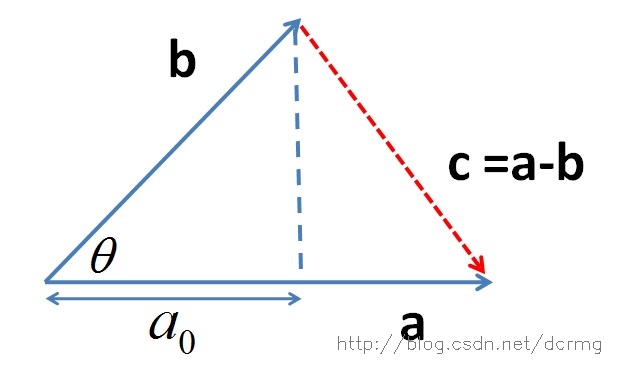
点乘的几何意义是可以用来表征或计算两个向量之间的夹角,以及在b向量在a向量方向上的投影,有公式:

叉乘:


在三维几何中,向量a和向量b的叉乘结果是一个向量,更为熟知的叫法是法向量,该向量垂直于a和b向量构成的平面。
especially, 在二维空间中,叉乘还有另外一个几何意义就是:aXb等于由向量a和向量b构成的平行四边形的面积。
以下内容为转载:
运动学模型:
以O-长方形的安装方式为例,四个轮子的着地点形成一个矩形。正运动学模型(forward kinematic model)将得到一系列公式,让我们可以通过四个轮子的速度,计算出底盘的运动状态;而逆运动学模型(inverse kinematic model)得到的公式则是可以根据底盘的运动状态解算出四个轮子的速度。
底盘的运动可以用三个独立变量来描述:X轴平动、Y轴平动、yaw 轴自转;四个麦轮的合理速度是存在某种约束关系的,逆运动学可以得到唯一解,而正运动学中不符合这个约束关系的方程将无解。
尝试构建逆运动学模型,分四步进行:
①将底盘的运动分解为三个独立变量来描述;
②根据第一步的结果,计算出每个轮子轴心位置的速度;
③根据第二步的结果,计算出每个轮子与地面接触的辊子的速度;
④根据第三部的结果,计算出轮子的真实转速。
一、底盘运动的分解
底盘运动分解为3个独立变量:
表示 X 轴运动的速度,即左右方向,定义向右为正;
表示 Y 轴运动的速度,即前后方向,定义向前为正;
表示 yaw 轴自转的角速度,定义逆时针为正。
以上三个量一般都视为四个轮子的几何中心(矩形的对角线交点)的速度。
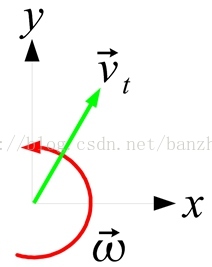
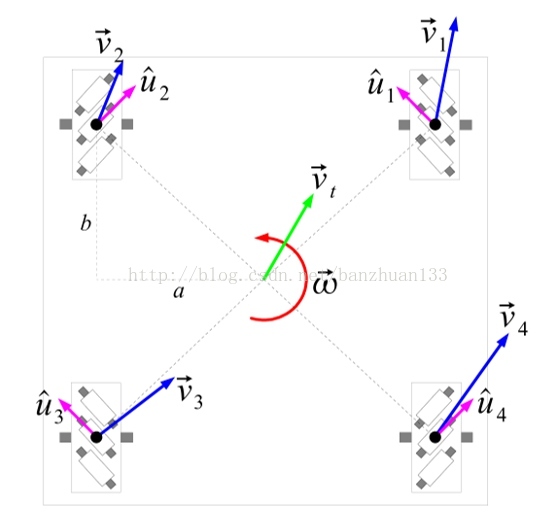
二、计算出轮子轴心位置的速度
定义:
为从几何中心指向轮子轴心的矢量;
为轮子轴心的运动速度矢量;
为轮子轴心沿垂直于
的方向(即切线方向)的速度分量;
那么可以计算出: ?wxr??
分别计算 X、Y 轴的分量为:
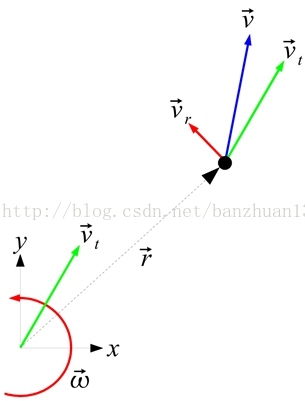
同理可以算出其他三个轮子轴心的速度。
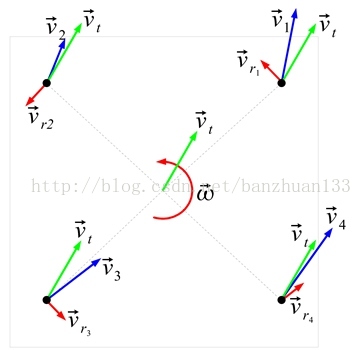
三、计算辊子的速度
根据轮子轴心的速度,可以分解出沿辊子方向的速度 和垂直于辊子方向的速度
。其中
是可以无视的(思考题:为什么垂直方向的速度可以无视?),而
其中 是沿辊子方向的单位矢量。
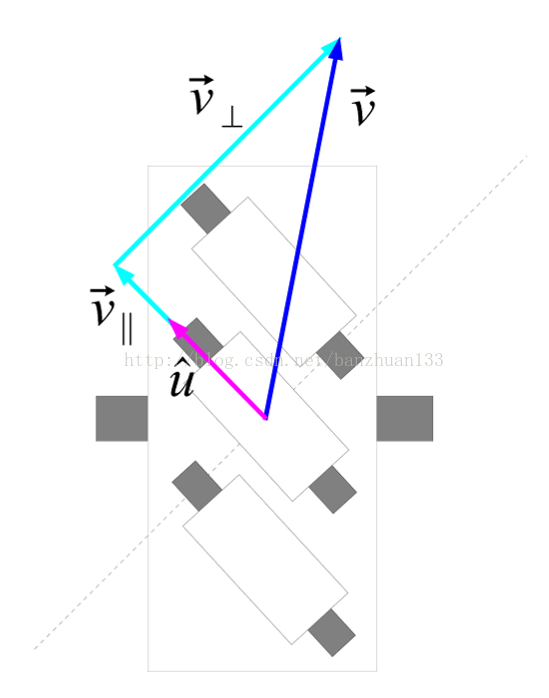
四、计算轮子的速度
从辊子速度到轮子转速的计算比较简单:
根据上图所示的 和
的定义,有
结合以上四个步骤,可以根据底盘运动状态解算出四个轮子的转速:
以上方程组就是O-长方形麦轮底盘的逆运动学模型,而正运动学模型可以直接根据逆运动学模型中的三个方程解出来,此处不再
里程计计算:
由上可得:Vy=(V4+V3+V2+V1)/4,Vx=(V4-V3+V2-V1)/4,w=(V4-V3-V2+V1)/(4(a+b)),(v1,v2,v3,v4应该存在某个关系,未推导)
固定短间隔积分Vx,Vy,w即可获得里程计数值。
另一种计算方式
「传统」的推导过程虽然严谨,但还是比较繁琐的。这里介绍一种简单的逆运动学计算方式。
我们知道,全向移动底盘是一个纯线性系统,而刚体运动又可以线性分解为三个分量。那么只需要计算出麦轮底盘在「沿X轴平移」、「沿Y轴平移」、「绕几何中心自转」时,四个轮子的速度,就可以通过简单的加法,计算出这三种简单运动所合成的「平动+旋转」运动时所需要的四个轮子的转速。而这三种简单运动时,四个轮子的速度可以通过简单的测试,或是推动底盘观察现象得出。
当底盘沿着 X 轴平移时:
当底盘沿着 Y 轴平移时:
当底盘绕几何中心自转时:
将以上三个方程组相加,得到的恰好是根据「传统」方法计算出的结果。这种计算方式不仅适用于O-长方形的麦轮底盘,也适用于任何一种全向移动的机器人底盘。
正运动学模型:
This problem, in general,has no solution,since it represents an overdetermined system of simultaneous linear equations. The physical meaning of this is: if four arbitrary rotational velocities are chosen for the four wheels, there is in general no vehicle motion which does not involve some wheel "scrubbing" (slipping) on the floor. However, a matrix [F] which generates a "best fit" least squares solution can be found.