本文为印度Rourkela国家技术研究所(作者:Alok Kumar Jha)的博士论文,共213页。
本文研究了多个移动机器人的智能控制和路径规划问题,提出了细菌觅食优化算法、径向基函数网络和蜜蜂算法三种软计算方法。首先,分析了等步长细菌觅食优化算法在移动机器人导航中的应用。在此基础上,提出了一种自适应细菌觅食优化控制器。此外,还开发了一种基于径向基函数神经网络的移动机器人导航控制器。训练模式的数量旨在训练RBFN控制器,以适应导航过程中出现的不同情况。蜜蜂算法还被用于未知环境下移动机器人的路径规划,一种新的适应度函数被用来有效地执行基本的导航任务。
除了选择单一独立的方法外,还提出了混合模型以提高独立导航的能力。针对一、二、四个移动机器人在各种情况下的导航问题,提出并分析了五种混合模型。对机器人在仿真和实时中的行走距离和所花费时间进行了比较。此外,所有提出的方法都能解决移动机器人导航路径规划的基本问题。控制器的设计、开发和分析适用于各种情况,例如机器人在室内环境中的可能应用。对不同环境下的单机器人和多机器人进行了计算机仿真,验证了所提出控制器的有效性。此外,已经在真实物理环境中执行、分析并比较了各种算法,以展示所开发控制器的有效性。
This work reports the problem of intelligent control and path planning of multiple mobile robots. Soft computing methods, based on three main approaches i.e. 1) Bacterial Foraging Optimization Algorithm, 2) Radial Basis Function Network and 3) Bees Algorithm are presented. Initially, Bacterial foraging Optimization Algorithm (BFOA) with constant step size is analyzed for the navigation of mobile robots. Then the step size has been made adaptive to develop an Adaptive Bacterial Foraging Optimization (ABFO) controller. Further, another controller using radial basis function neural network has been developed for the mobile robot navigation. Number of training patterns are intended to train the RBFN controller for different conditions arises during the navigation. Moreover, Bees Algorithm has been used for the path planning of the mobile robots in unknown environments. A new fitness function has been used to perform the essential navigational tasks effectively and efficiently. In addition to the selected standalone approaches, hybrid models are also proposed to improve the ability of independent navigation. Five hybrid models have been presented and analyzed for navigation of one, two and four mobile robots in various scenarios. Comparisons have been made for the distance travelled and time taken by the robots in simulation and real time. Further, all the proposed approaches are found capable of solving the basic issues of path planning for mobile robots while doing navigation. The controllers have been designed, developed and analyzed for various situations analogous to possible applications of the robots in indoor environments. Computer simulations are presented for all cases with single and multiple mobile robots in different environments to show the effectiveness of the proposed controllers. Furthermore, various exercises have been performed, analyzed and compared in physical environments to exhibit the effectiveness of the developed controllers.
1 引言
2 文献回顾
3 轮式移动机器人的运动、运动学建模与分析
4 移动机器人导航的细菌觅食优化算法分析
5 移动机器人导航的RBF神经控制器分析
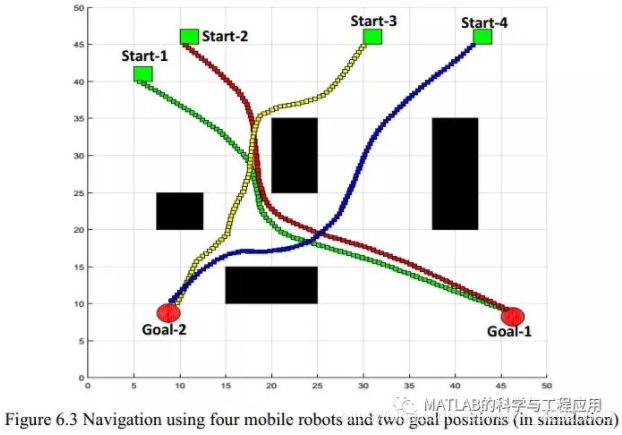
6 移动机器人导航的蜜蜂算法分析
7 移动机器人导航的混合技术
8 结论与未来研究方向
附录A 实验分析中使用的机器人描述
附录B 与本文相关的研究成果
下载英文原文地址:
http://page2.dfpan.com/fs/8lcccj72124132a9169/
更多精彩文章请关注微信号: