本文为德国弗莱堡大学(作者:MarenBennewitz)的博士论文,共164页。
最近几年,服务机器人在人类居住的环境中工作变得非常流行。例如,在医院、办公大楼、百货商店和博物馆中存在各种各样的机器人系统。此外,一些多机器人系统已经被开发用于更复杂的任务,这些任务可以由整个机器人团队来完成,而不仅仅是单个机器人。这些任务包括表面清洁、投递和未知地形的探索等。每当移动机器人团队在同一环境中工作时,它们的运动必须相互协调,以避免拥挤或碰撞。同时,机器人应该在最短的时间内完成它们的导航任务。因此,需要复杂的路径规划技术来满足这些要求。由于机器人的关节配置空间通常很大,并且随着机器人数量的增加呈指数增长,现有的单机器人系统的路径规划方法不能直接移植到多机器人系统。
现有的许多多机器人系统的路径规划方法是解耦的,这意味着它们首先为各个机器人独立地规划路径。然后,它们会检查如果路径被执行,机器人之间是否会变得过于接近彼此。在这种情况下,将重新计算路径以避免冲突。许多解耦方法将优先级分配给各个独立的机器人,这些优先级定义了机器人路径必须重新计算的顺序。通过计算机器人的路径,将优先级较高机器人的路径视为固定的,这样,搜索空间就大大减少了。现有的大多数优先级解耦方法使用固定优先级方案(机器人的顺序)。然而,机器人路径的重新计算顺序严重地影响着是否能够求解,以及该解对于整个多机器人系统是否有效。
在本论文的第一部分中,我们提出了一种方法,即在所有优先方案的空间中搜索,找出机器人的路径排序,以此来计算路径规划问题的解。在搜索过程中,我们根据任务规范自动推断出机器人优先级之间的约束。在找到合适的优先级方案后,尝试通过使用爬山策略对其进行改进。我们的搜索方法可以用来查找和优化由任何优先路径规划技术生成的路径。在几个实际机器人系统的实验和仿真中,我们证明了即使对于困难的路径规划问题,该方法也能产生有效的解决方案。
论文的第二部分主要研究了人类活动环境中的机器人。如果这些机器人对周围人类的活动做出适当的反应并且不干扰他们,就能够进一步改善它们的行为。与多机器人路径规划系统相比,人类的运动路径是未知的。因此,机器人必须能够用传感器检测人、识别人,并了解他们的运动意图,以便能够更好地预测他们未来的行为。本文提出了一种利用EM算法从传感器数据中学习人体典型运动模式的方法。此外,我们描述了如何利用所学习的模式来预测人们未来的运动。随后,我们解释了如何将这些知识集成到移动机器人的路径规划过程中。最后,我们介绍了一种从已学运动模型中自动导出隐马尔可夫模型(HMM)的方法,这些隐马尔可夫模型可以被移动机器人用来预测多个人的位置,即使当这些人在其视野之外。为了基于激光距离数据和视觉信息更新隐马尔可夫模型,我们应用了联合概率数据关联滤波器。在实践中,如果机器人长时间不观察人的位置,就会对人的位置产生不确定性。因此,我们提出一种决策理论方法来确定当机器人执行其任务时所执行的观察动作,并用我们的移动机器人进行了实际的实验演示。
•我们的方法能够学习人的典型运动模式
•通过基于所学习的运动模式预测人的运动,可以改善机器人的导航行为
•派生的HMM可用于可靠地保持多人当前位置的概率信念,即使他们目前不在其视野之内
•我们的技术产生了有效的作用,从而大大减少了机器人对于人们位置的不确定性
我们的方法适用于设计成与人类共存的各种服务机器人。在许多任务中,了解人们在环境中的当前位置是有帮助的。例如,这种信息使得机器人能够更有效地执行个人递送任务,从而减少绕行的次数。此外,一个知道目前哪些房间无人的清洁机器人可以在不打扰任何人的情况下执行其任务;家庭护理机器人可以通过知道它正在向谁提供服务或者它要去哪里来改善它的行为。例如,机器人可以产生避免干扰人类的运动动作。所有这些信息都允许对机器人进行策略定位以提供个人帮助。
综上所述,我们提出了促进机器人与人在现实世界环境中共存并交互的技术。
Service robots which act in environmentspopulated by humans have become very popular in the last few years. A varietyof systems exists which act for example in hospitals, office buildings,department stores, and museums. Furthermore, several multi-robot systems havebeen developed for tasks which can be accomplished more efficiently by a wholeteam of robots than just by a single robot. These tasks include surfacecleaning, deliveries, and the exploration of unknown terrain. Whenever teams ofmobile robots are operating in the same environment their motions have to becoordinated in order to avoid congestions or collisions. At the same time therobots should perform their navigation tasks in a minimum amount of time. Thus,sophisticated path planning techniques are needed that fulfill theserequirements. Since the joint configuration space of the robots is typicallyhuge and grows exponentially with the number of robots, existing path planningmethods for single robot systems cannot directly be transferred to multirobotsystems. Many existing path planning methods for multi-robot systems aredecoupled, which means that they first plan paths for the individual robotsindependently. Afterward, they check if the robots would get too close to eachother if the paths were executed. In such a case the paths are recomputed toavoid these conflicts. Many decoupled methods assign priorities to theindividual robots. These priorities define an order in which the paths of therobots have to be recomputed. By computing the path of a robot, the paths ofthe robots with higher priority are considered as fixed. This way, the size ofthe search space is extremely reduced. Most of the existing prioritizeddecoupled methods use a fixed priority scheme (order of the robots). However,the order in which the paths of the robots are recomputed has a seriousinfluence on whether a solution can be found at all and on how efficient thesolution is for the overall multi-robot system. In the first part of thisthesis we present an approach which searches in the space of all priorityschemes to find an order of the robots for which a solution to the pathplanning problem can be computed. During the search, we utilize constraintsbetween the priorities of the robots which are automatically derived from thetask specification. After an appropriate priority scheme has been found, ourtechnique tries to improve it by using a hill-climbing strategy. Our searchmethod can be used to find and optimize paths generated by any prioritizedpathplanning technique. In several experiments with a real-robot system as wellas in simulation we show that our approach produces efficient solutions evenfor difficult path planning problems. The second part of this thesis is focusedon robots acting in environments populated by humans. These systems can improvetheir behavior if they react appropriately to the activities of the surroundingpeople and do not interfere with them. In contrast to a multi-robot pathplanning system, the future movements of people are not known. Therefore, therobots have to be able to detect people with their sensors, to identify them,and to learn their intentions in order to be able to make better predictions oftheir future behavior. In this thesis we present an approach to learn typicalmotion patterns of people from sensor data using the EM algorithm. Furthermore,we describe how the learned patterns can be used to predict future movements ofthe people. Afterward, we explain how this knowledge can be integrated into thepath planning process of a mobile robot. Finally, we introduce a method whichautomatically derives Hidden Markov Models (HMMs) from the learned motionmodels. These HMMs can be used by a mobile robot to predict the positions ofmultiple persons even when they are outside its field of view. To update theHMMs based on laser-range data and vision information we apply JointProbabilistic Data Association Filters. In practice, the robot becomesuncertain about the positions of people if it does not observe them for a longperiod of time. We therefore propose a decision-theoretic approach to determineobservation actions that are carried out while the robot is executing its tasks.Practical experiments carried out with our mobile robot demonstrate • that ourmethod is able to learn typical motion patterns of people, • that thenavigation behavior of the robot can be improved by predicting the motions ofpeople based on the learned motion patterns, • that the derived HMMs can beused to reliably maintain a probabilistic belief about the current positions ofmultiple persons even if they are currently not in its field of view, and •that our technique generates effective actions that seriously reduce theuncertainty in the belief about the positions of people. Our approach is usefulfor service robots of various types that are designed to coexist with humans.In many tasks it is helpful to know the current locations of the people in theenvironment. For example, this knowledge enables a robot to more efficientlycarry out personal delivery tasks since the number of detours is reduced. Alsoa cleaning robot that knows which rooms are currently empty can carry out itstasks without disturbing anyone. Furthermore, a home care robot can improve itsbehavior by knowing where the person it is providing service to currently is orwhere it is going to. The robot can then, for instance, generate motion actionsthat avoid interferences with the person. Additionally, this knowledge allowsstrategic positioning of the robot for providing personal assistance. Insummary, we present techniques which facilitate the coexistence of robots andhumans in real world environments as well as the interaction between them.
1 引言
2 多机器人路径规划
3 学习人类运动模式
4 自适应导航策略
5 使用HMM估计多人位置信息
6 结论
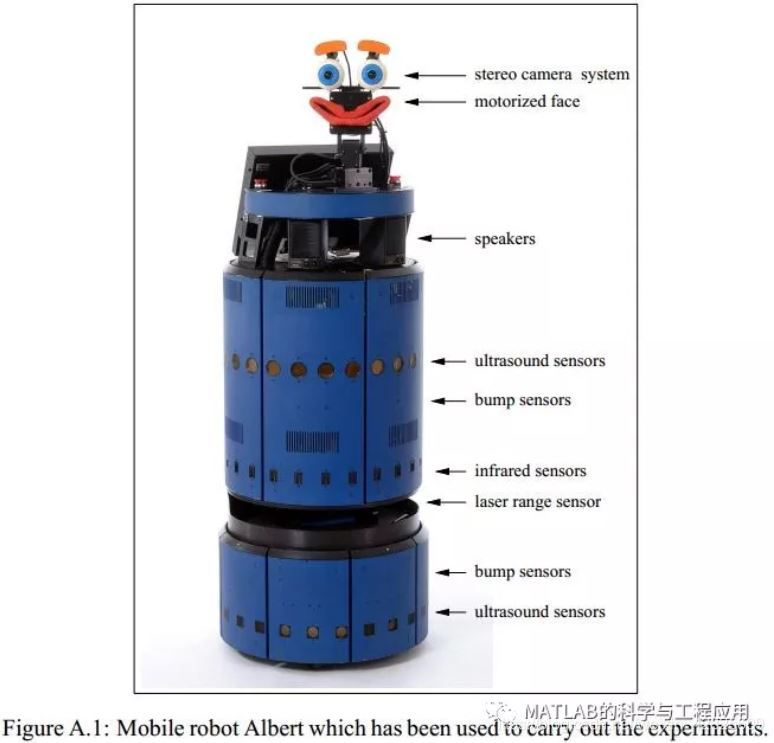
附录A.1 B21r机器人Albert
附录A.2 概率理论
附录A.3 证明:EM单调增大数据似然性
附录A.4 概率近似
附录A.5 指派概率的计算
下载英文原文地址:
http://page2.dfpan.com/fs/clcj12214291363bd32/
更多精彩文章请关注微信号: