配置空间
机器人规划的配置空间概念:一个空间包含所有机器人自由度的机器人配置,描述为C-space
- 机器人配置:表示对机器人上面所以点的位置的描述
- 机器人自由度:规划的时候用最少的坐标数量去表示机器人配置,例如无人机规划,在微分平坦中进行规划则是x\y\z\yaw四个变量,所以对于无人机轨迹规划来说有四个自由度。
- 机器人配置空间:一个空间包含所有机器人自由度的机器人配置,描述为C-space
任何可能的机器人的位姿在C-space中描述为一个点
配置空间的意义:
在工作空间中进行规划,机器人有不同的形状和大小,比如有圆形的或方形的碰撞检测需要知道机器人的外形,然后再做检测,这样是费时费力的。

在配置空间中做规划
机器人在C-space中表示一个点,例如位置就是一个点属于R3一个位姿属于SO(3)
在配置空间中,机器人表示成了一个点,那么在配置空间中,障碍物也需要特殊的处理,把工作空间中的障碍物变成配置空间中的障碍物,被称为 配置空间障碍物或者C-obstacle这个工作是在运动规划前完成的,一次完成的工作。
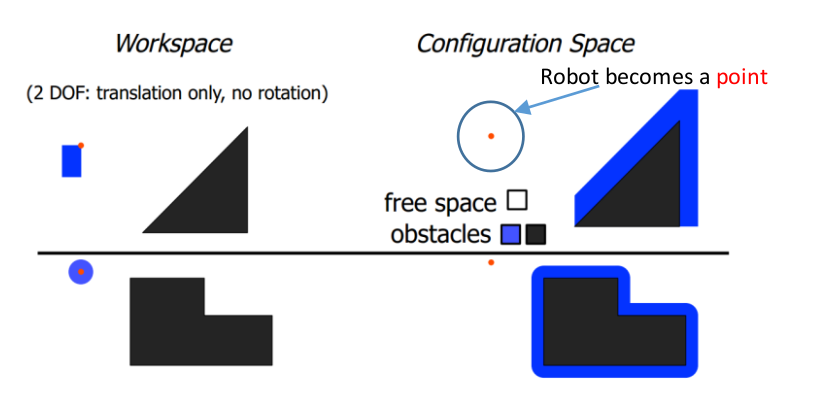
障碍物安照机器人尺寸进行膨胀,上面机器人被设置成了一个点,只要点在障碍物外面,就不会发生碰撞
C-space是C-obstacle 和C-free组成的
经过配置空间的处理,路径规划变成了在C-free 中找到起点和终点的路径寻找。
在工作空间中,机器人有尺寸有形状,对于运动规划会带来困难,在配置空间中,机器人用一个点来描述,方便做运动规划
经过上述配置空间的操作,碰撞检测就进行了简化,这就是配置空间的意义。
机器人被看做是一个球体,半径为r
对障碍物安照半径r进行膨胀,蓝色就是膨胀后的障碍物,然后就可以进行路径规划和生成。