种子样本采集
1. Image-to-Object Transfer
训练一个多标签分类CNN模型作为识别种子样本的第一步,采用Hypothesis-CNN-Pooling (HCP)方法将图像中属于同一类物体的候选区域提取出来。在综合预测阶段对每一类采用cross-proposal max-pooling,筛选出一些与目标类最相关的候选区域。这样,图像级别的分类错误只能通过the most confident proposal进行反向传播,这样网络就可以在训练过程中获得空间意识。

2. Reliable Seed Proposal Generation
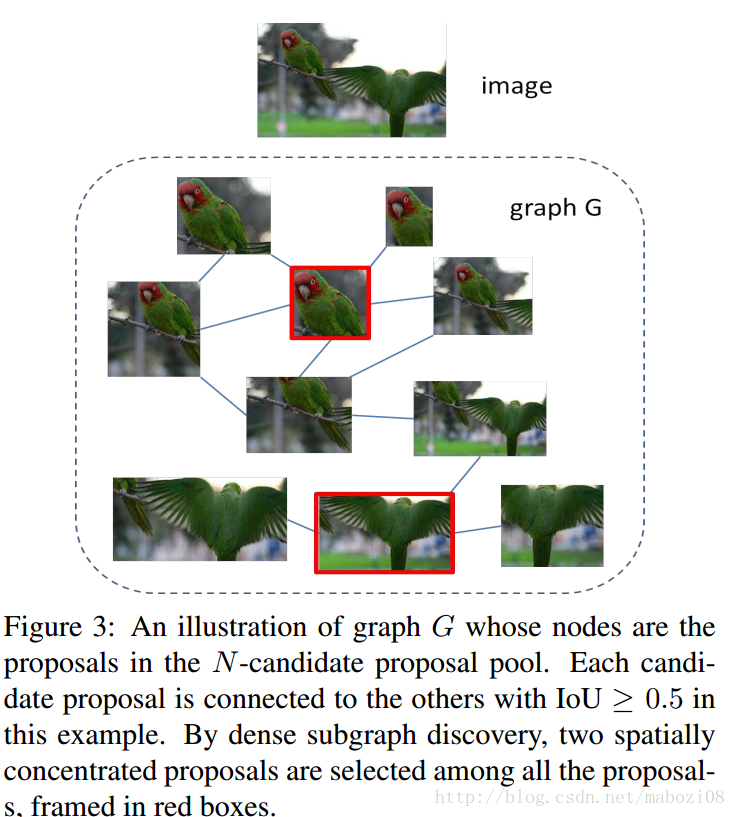
上一步筛选出来的区域不一定包含完整的目标物体,为了结合空间相关性,将其表述为dense subgraph discovery (DSD) problem即要从候选区域中选择一个最好的区域。我们提出一种贪婪的算法来发现G的稠密子图。贪婪算法迭代地选择具有最大程度的节点(到其他节点的连接的数量最多),然后修剪该节点及其所有连接的相邻节点,重复发现、修剪直到剩余节点的数量小于预定数量k。迭代中的所有修剪节点构成稠密子图。最好的候选区域位于同一个物体组成的节点网络的中心点位置。它的连接点最多。
在线支持样本采集工作
通过 Fast R-CNN 进一步得到 higher-quality positive samples,通过观察不同候选区域的 relative improvement (RI) of output CNN scores来自动找出最好的候选区域
坏的候选区域,对于不断提高的 Fast R-CNN。很难获得relative improvement
好的候选区域,对于不断提高的 Fast R-CNN。可以获得relative improvement
introduce negative rejection (NR) performed after several epochs of online supportive sample harvesting (OSSH)
按照预测的CNN得分的顺序对所有正样本进行排序,然后去除具有最小CNN得分的10%样本及其对应的图像,再进行Fast R-CNN训练
数据集:PASCAL VOC 2007 and 2012