预备知识




1.IMU测量模型(B系)
Bω~,Ba~

2.世界系下运动模型(W系)
RWBW,Wv,Wp
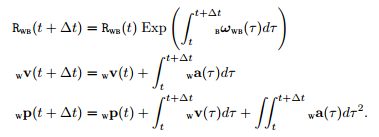
2.1 运动模型

2.2 IMU测量帧运动积分
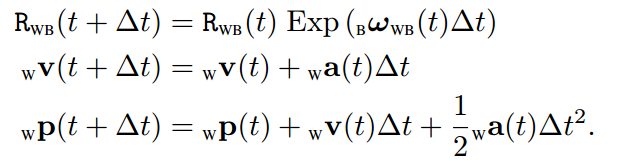
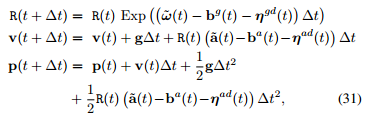
2.3 离散形式(单位时间间隔保持加速度不变)
2.4 代入测量值
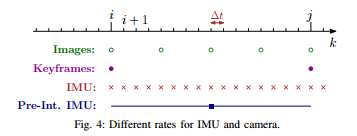
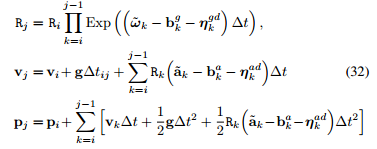
3.两视觉关键帧间运动积分(IMU测量帧叠加)(W系)
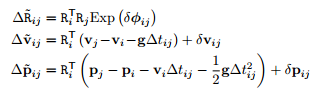
4.消除线性化时间点的影响,定义相对运动增量(B系)
ΔRij,Δvij,Δpij
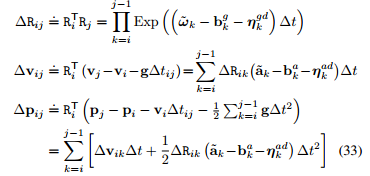
其中 应该为
21gΔtij2
应该为
21gΔtij2
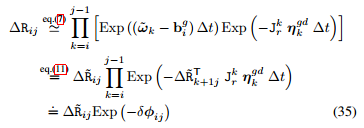
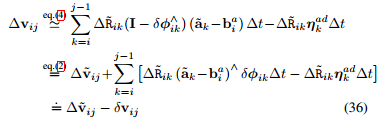
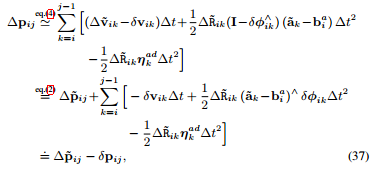
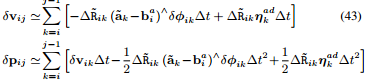
5.分离测量值和噪声
ΔRij~,Δvij~,Δpij~,δϕij,δvij,δpij
6.预积分测量模型
7.噪声信息矩阵求解
ηijΔ=[δϕijTδvijTδpijT]T,ηkd=[ηkgdηkad]
7.1 噪声分布形式

7.2 噪声增量式更新


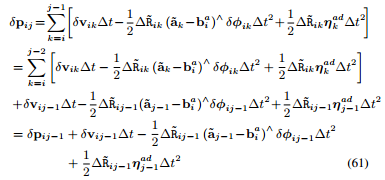
7.3 信息矩阵更新


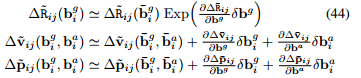
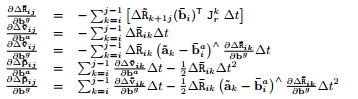
8. bias更新时测量值的更新
ΔRij^~,ΔRijˉ~,Δvij^~,Δvijˉ~,Δpij^~,Δpijˉ~,δbig,δbia
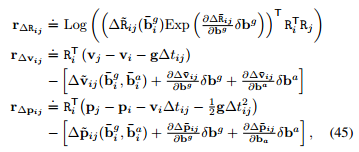
9. 残差及Jacobians计算
残差
rΔpij,rΔvij,rΔRij(B系)
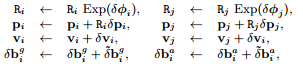
状态变量
Ri,vi,pi,Rj,vj,pj,δbig,δbia (W系)
增量
Bδϕbkbk+1,Bδpbkbk+1,Wδvbkbk+1,δbg~,δba~
9.1 残差计算
9.2 状态变量及对应增量
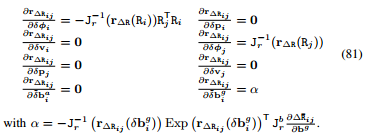
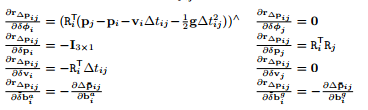
9.3 残差关于状态变量的Jacobians
(1)
rΔpij
(2)
rΔvij
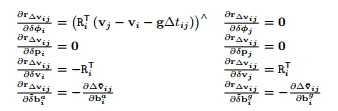
(3)
rΔRij