1.约束
定义约束:限制质点或者质点系运动的条件称为约束,表示这些限制条件的数学方程称为约束方程。
(1)几何约束
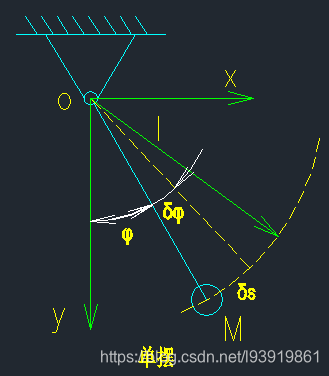
限制质点或者质点系在空间的几何位置的条件称为几何约束.如单摆,其中质点M可绕固定点O在平面Oxy内摆动,摆长为l.这时摆杆对质点的限制条件是:质点M必须在以点O为圆心,以l为半径的圆周上运动.其约束方程为:

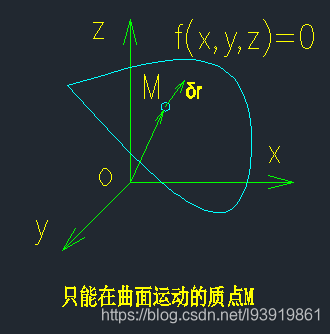
又质点M在固定的曲面上运动,那么曲面方程就是质点M的约束方程,即

上面的两个例子中各约束都是限制物体的几何位置,都是几何约束。
(2)运动约束
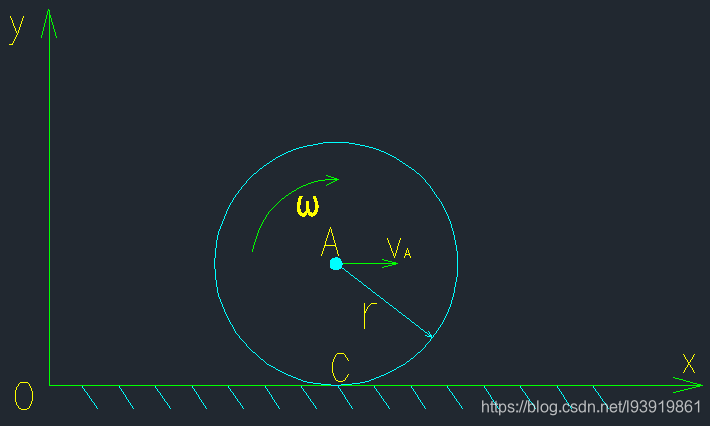
车轮沿直线轨道作纯滚动,车轮除了受到限制其轮心A始终与地面保持距离为r的几何约束外,还受到只滚不滑的运动学限制,每一瞬间都有

(3)定长约束和非定长约束
单摆摆长l随时间变化,重物M由一根穿过固定圆环O的细绳系住.设摆长在开始时间为l0,然后以不变的速度拉动细绳的另一端,此时单摆的约束方程为:
x2+y2=(l0-vt)2
约束条件随时间变化,这类约束称为非定长约束。
反之,不随时间变化的约束称为定长约束。
2.虚位移
在某瞬时,质点系在约束允许的条件下,可能实现的任何无限小的位移称为虚位移。 虚位移可以是线位移也可以是角位移。
虚位移和实际位移是不同的概念,实位移是质点系在一定时间内真正实现的位移,它除了和约束条件有关外,还与时间,主动力以及运动的初始条件有关;而虚位移仅与约束条件有关。
因为虚位移是任意的无限小的位移,所以在定常条件下,实位移只是所有虚位移中的一个,而虚位移视约束情况,可以有多个,甚至无穷多个.对于非定长约束,某个瞬时的虚位移是将时间固定后,约束所允许的虚位移,而实位移是不能固定时间的,所以这时实位移不一定是虚位移中的一个。
3.虚功
力在虚位移中作的功称为虚功。
4.理想约束
如果在质点系的任何虚位移中,所有约束力所作的虚功的总和等于零,称这种约束为理想约束。
光滑固定面约束、光滑铰链、无重刚杆、不可伸长的柔索、固定端等约束都可视为理想约束。
5.虚位移原理
设有一个质点系处于静止平衡状态,取质点系中任一质点mi,作用在该质点上的主动合力为Fi,约束力的合力为FNi。因为质点系处于平衡状态,则质点也处于平衡状态,因此
Fi+FNi=0
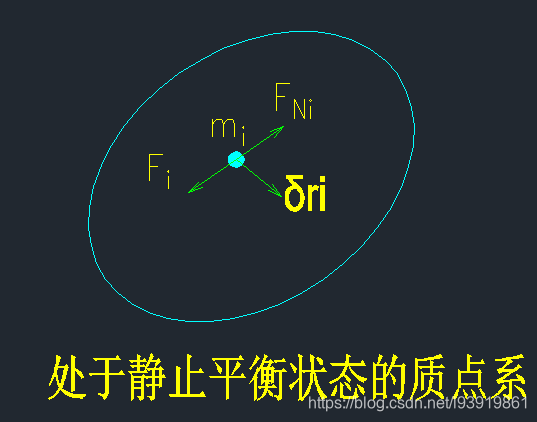
若给质点系以某种虚位移,其中质点mi的虚位移为δri,则作用在质点mi上的力的Fi和FNi的虚功总和为
Fi•δri+FNi•δri=0
对于质点系内所有质点,都可以得到与上式同样的等式,将这些等式相加,得
ΣFi•δri+ΣFNi•δri=0
如果质点系具有理想约束,则约束力在虚位移中所作虚功的总和为零,即
ΣFNi•δri=0,故得
ΣFi•δri~=0
用δWFi代表作用在质点mi上主动力的虚功,δWFi=Fi•δri,则可得到
ΣδWFi=0
结论:对于具有理想约束的质点系,其平衡的充分必要条件是:作用于质点系的所有主动力在任何虚位移中所作的虚功的和等于零。上述结论称为虚位移原理,又称为虚功原理。
虽然应用虚位移原理的条件是质点系应具有理想约束,但也可以用于有摩擦的情况,只要把摩擦力当做主动力,在虚功方程中计入摩擦力所作的虚功即可。