前一篇讲了虚功原理,而虚功原理的重要前提是理想约束。
如果作用在一力学体系上诸约束反力在任意虚位移δr中所作的虚功之和为零,那么这种约束叫做理想约束。理想约束的概念是从实际约束中抽象得来,它反映了相当广泛的一些实际约束的主要性质。
下面是几种常见的理想约束。
(1)光滑接触面约束
光滑接触面约束的约束反力总在两接触面通过接触点的公法线方向上,而质点的虚位移在接触面过接触点的切面上。因此,约束反力在任何虚位移中的虚功恒等于零。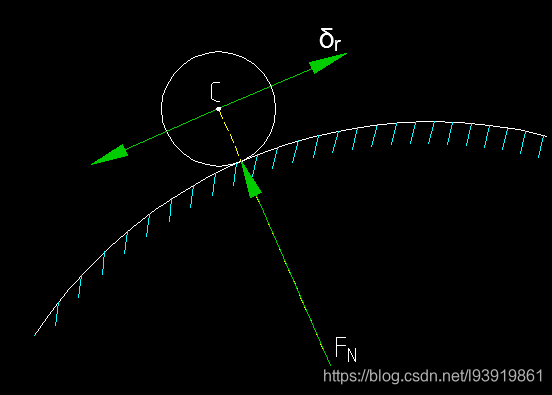
(2)无重刚性杆
一无重刚性杆连接两质点,A、B两质点的约束反力FA,FB ,沿杆轴线,大小相等,方向相反。设A、B两质点的虚位移分别为δrA, δrB。由于质点系的虚位移应该满足相容条件,刚性杆不能变形,A、B两点的虚位移在AB连线上的投影必然相等,即有:
δr’A=δr’B
因此,约束反力 二力在相应的虚位移上的虚功之和为零。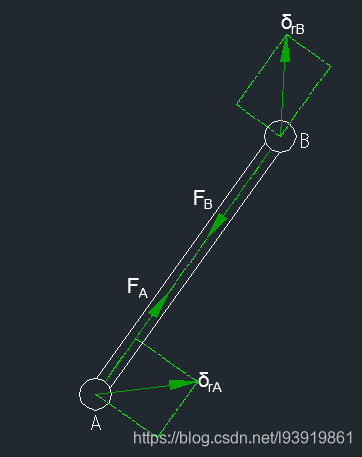
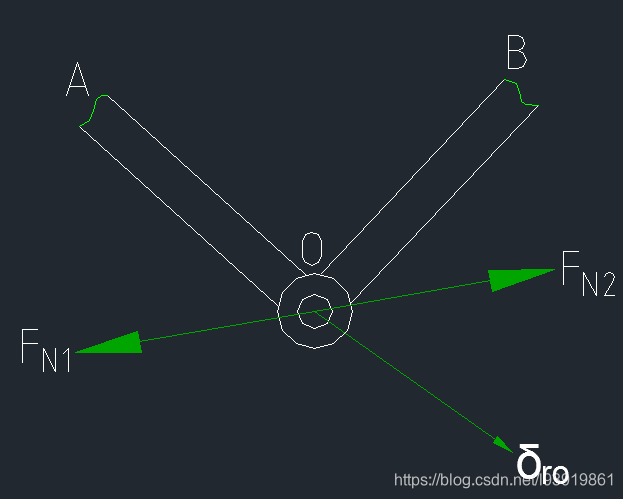
(3)连接两刚体的光滑铰链约束
刚体A、B由光滑铰链连接在一起。作用在销钉O上的约束反力FN1 ,FN2大小相等,方向相反,即
FN1 = FN2
显然,此二力在销钉O的任何虚位移上的虚功之和为零。
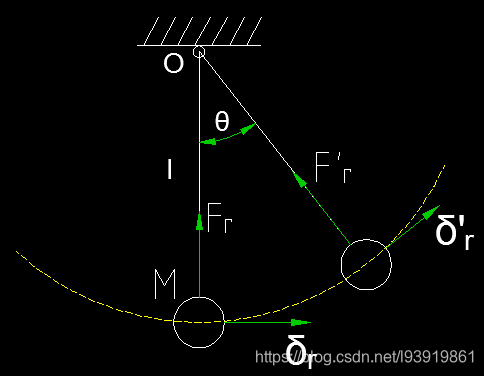
(4)不可伸长的绳索
单摆由一端固定,另一端系住一质点M的不可伸长的绳索组成。设绳索不可伸长,小球在绳索的约束下,可在平面内摆动。将小球视为一个质点,如果在运动中,始终满足约束条件,绳索既不松弛也不蜷曲,小球在铅垂位置时,绳子给小球的约束力FT (拉力),质点的虚位移必垂直于绳索拉力,为水平方向,拉力在该质点的虚位移的虚功等于零;当球摆到绳与铅锤线成任意θ角时,绳子给小球的约束力,质点的虚位移沿小球轨迹的切线方向,仍然垂直于绳索拉力,即不可伸长的绳索拉力在质点的任何虚位移上的虚功等于零。
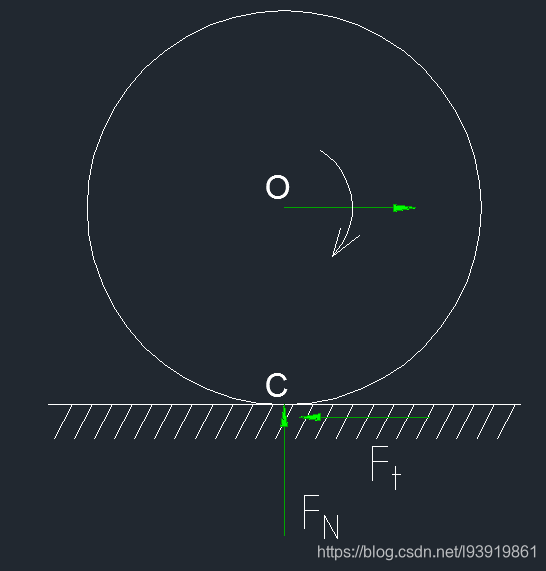
(5)无滑动的滚动
圆轮在固定约束面上作无滑动的滚动,如果接触面足够刚性,可以略去滚动摩阻力偶,则当轮子作无滑动的滚动时,轮子与约束面的接触点是轮子作平面运动的瞬心C,可以将轮子的运动看做是绕瞬心C作瞬时转动,C点处的虚位移为零,约束轮子运动的法向力和摩擦力都通过C点,因此有:
FN • δr+ Ff • δr=0。
(6)研究意义
力学研究中,理想约束具有重要的意义,实例也非常多,如质点强制地沿固定光滑面的运动,质点强制地沿运动的或变形的光滑面的运动,圆球或圆盘沿完全粗糙的水平面作纯滚动,两刚体间理想光滑接触,两刚体间光滑铰接,等等。经典力学和现代力学的大多数理论研究都是基于该假设的.因此具有非常重要的意义。
同时该假设的工程实际应用也是完全可能的,且实际效果也非常成功。这是因为,第一,为描述自然现象和大多数技术过程,必然要做各种各样的假设,而理想约束这样的假设有足够的精确度。如复杂的机构系统可看成是刚体系统,其中刚体两两之间或刚性连接后铰链联结或以其表面相接触。第二,即便系统所受约束不是理想约束.我们也可以将其作为主动力来考虑,如摩擦力作虚功,可将其归为主动力范畴来考虑,由于未知量摩擦力的出现而缺少的方程由摩擦定律来补充。分析力学在处理约束问题上这一创造性的特点,具有重要的理论及实际意义。