最近在搞超声波,把自己走过的一些坑,和经验分享一下,互相学习,让初学者少走一些弯路,K60代码网上找了一些,结果没有能用的,没办法,自己看讲解,用PIT计时测试成功,在K60和K66上测试可以使用,测距也比较准确,希望能有些帮助
1HC-SR04超声波测距原理
准备 :引出4个排针,连接到单片机的vcc(5V),io口,io口,gnd,用到2个io口,
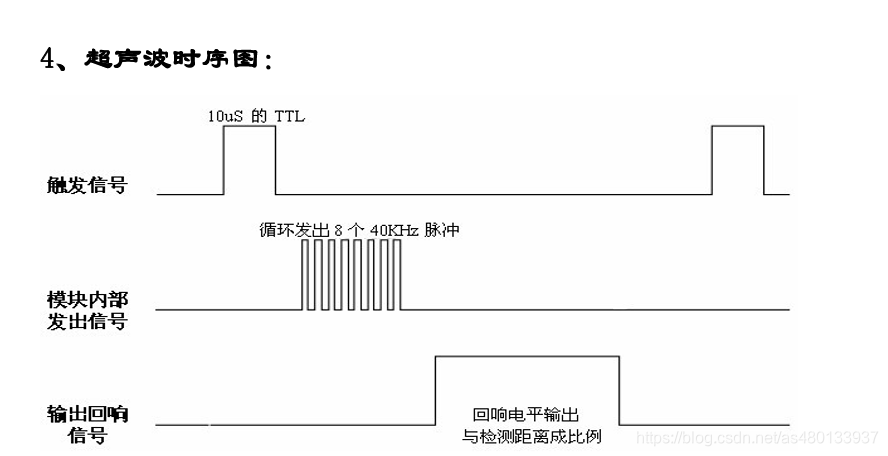
1.给脉冲触发引脚(Trig)输入一个持续时间>10us的高电平
2.输入方波后,模块会自动发射8个40KHz的声波,与此同时回波引脚(ECOH)端的电平会由0变为1; (输出一个高电平)(此时应该启动定时器计时)
.3.当超声波返回被模块接收到时,接收端的电平会由1变为0(变为低电平);该高电平的持续时间即为超声波往返的时间,(这时停止定时器计数),
4.在单片机里面通过定时器计算Echo高电平的持续时间即可算出超声波往返的距离。
5.测距公式:距离=(高电平时间*声速)/2;
2.调试经验
1注意超声波要接的是5V,不是3.3V,使用下载器时一般都是3.3V供电,这就导致在线调试没有数据,应该给板子供上电,下载器不供电,超声波接到5V电源口,并且检测下是不是5V.
2.测距时不要距离太近,会导致数据不准确
3.超声波代码要尽量精简,不要繁琐,假设你代码过于繁琐,因为超声波测距时间非常短(us单位)可能这次电平已经发生变化,但是你的MCU在经行其他代码运行,可能就检测不到这次信号。
4.要考虑各种因素影响测距稳定,比如高电平检测是否准确,温度原因等,超声波测距的性能与被测物表面材料有很大关系,如毛料、布料对超声波 的反射率很小,会严重影响测量结果。
5.io口任意两个即可,主语不要占用到之前本来使用的,否则会出问题,还有PIT1如果使用,就初始化PIT2进行计时,一个PIT做一种工作
话不多说直接上代码⬇
#include "MK60_PIT.h"
#define TRIG D9 //超声波发送端
#define ECHG E12 //超声波接收端
gpio_init(TRIG,GPO,0); //初始化发送端
gpio_init(ECHG,GPI,0); //初始化接收端
/*
* @file distance
* @brief 超声波测距
* @author ZZX
* @version v1.0
* @date 2019-1-17
*/
void distance(void)
{
gpio_set(TRIG,1); //产生触发脉冲
pit_delay_us(pit1,20);
gpio_set(TRIG,0); //产生一个20us的高电平脉冲
while(gpio_get (ECHG) == 0); //等待电平变高,低电平一直等待
pit_time_start (pit1); //开始计时
while(gpio_get(ECHG) == 1) //等待电平变低,高电平一直等待
{
};
timevar = pit_time_get(pit1); //停止计时,获取计时时间
//timevar = timevar * 340 /2/10;
timevar = timevar*(331.4+0.607*10)/2000; //加上温度补偿
DELAY_MS(60); //延时60MS,测距更精确,可以不用
}
上面代码测距误差在10mm以内,满足正常使用,直接调用函数即可
下面这个是使用外部触发中断进行的,附上部分代码,完整例程在下方下载,弄到百度云了,CSDN下载还要钱。。。
#include "common.h"
#include "include.h"
int task1 , task2 ;
void main ()
{
// gpio_init (PTB22, GPO,1);
// gpio_init (PTC4, GPO,0);
smg_init(); //数码管初始化
pit_init_ms(PIT1,5); //PIT1定时中断用于数码管显示
HCSR04_INIT(PTD9,PTE12); //超声波模块初始化
void porte_handler(void); //E12引脚外部中断函数
void pit1_hander(void); //PIT1定时中断
set_vector_handler(PORTE_VECTORn , porte_handler); //添加中断服务函数到中断向量表
// set_vector_handler(PIT1_VECTORn,pit1_hander); //设置中断服务函数到中断向量表里
enable_irq(PIT1_IRQn); //使能PIT1中断
while(1)
{
HCSR04_START(PTE6); //一次采集开始,触发引脚发送测距请求
while( gpio_get(PTE12)==0 ); //等待得到高电平响应
success_flag = 0; //测距成功标志位置零
pit_time_start(PIT0); //开启PIT0计时
enable_irq (PORTE_IRQn); //使能PORTE中断
systick_delay_ms(67); //67MS延时后采集数据。此时数据准确
if(success_flag==1) //67MS后发现测距成功
{
HCSR04_DATA_HANDLE((uint16)back_time); //计算距离
gpio_set (PTC4, 1);
}
else
{
back_time = 0; //若测距不成功,则清零计数时间
gpio_turn (PTB22);
}
}
}
void porte_handler() //下降沿触发的外部中断
{
uint8 n = 0; //引脚号
n = 12;
if(PORTE_ISFR & (1 << n)) //PTE12触发中断
{
PORTE_ISFR = (1 << n); //写1清中断标志位
back_time = pit_time_get_ms(PIT0); //得到计时器计数值,并关闭计时器
success_flag = 1;
disable_irq(PORTE_IRQn); //关闭引脚中断
}
}
void pit1_hander()
{
PIT_Flag_Clear(PIT1);
task1++ , task2++ ;
if(task1 == 1 )
{
task1 = 0 ;
}
if(task2 == 2 )
{
task2 = 0 ;
shumaguan_show_3(distance);
}
}
链接: https://pan.baidu.com/s/1F_Kt1vOPXhVOaN5ANrgLJA 提取码: hdx5