文章目录
前言
环境
- 硬件
DE2-115
HC-SR04超声波传感器 - 软件
Quartus 18.1
目标结果
使用DE2-115开发板驱动HC-SR04模块,并将所测得数据显示到开发板上的数码管。
1 实验原理
1.1 超声波原理
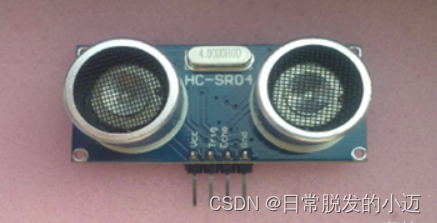
HC-SR04超声波测距模块可提供 2cm-400cm的非接触式距离感测功能,测距精度可达高到 3mm;模块包括超声波发射器、接收器与控制电路。图1为HC-SR04外观,其基本工作原理为给予此超声波测距模块触发信号后模块发射超声波,当超声波投射到物体而反射回来时,模块输出回响信号,以触发信号和回响信号间的时间差,来判定物体的距离。
模块测距工作原理:
- 主控设备给 Trig 脚提供一个 10us 的脉冲信号。
- HC-SR04 接收到信号,开始发送超声波,并把 Echo置为高电平,然后准备接收返回的超声波。
- HC-SR04 接收到返回的超声波,把 Echo 置为低电平。
- Echo 高电平持续的时间就是超声波从发射到返回的时间间隔。
如果超声波模块前方没有障碍物,约4米之内,那当Trig引脚被提供10μs以上脉冲触发信号后,该模块内部发射(transmit)8个40kHz的超声波脉冲并检测回波,Echo引脚收到一个高电平并持续38毫秒,之后就会处于低电平状态,所以当得到38ms这个值时,我们就知道前方没有检测到障碍物了。
如果前方有障碍物,那在发射超声波脉冲后,信号就会反射回来,Echo引脚就会在接收到信号时立即切换到低电平状态,此时Echo引脚在高电平状态保持的时间就是信号发射并返回的所花的时间。
1.2 硬件模块时序图
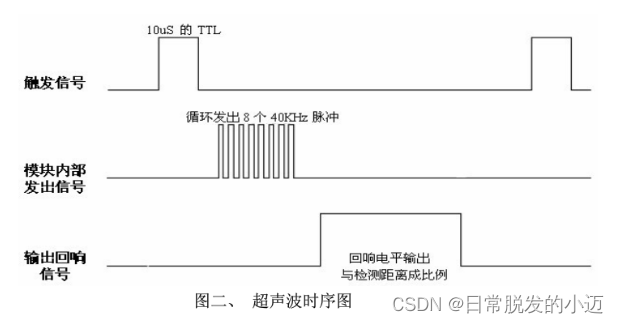
以上时序图表明你只需要提供-个10uS以上脉冲触发信号,该模块内部将发出8个40kHz周期电平并检测回波。一旦检测到有回波信号则输出回响信号。回响信号的脉冲宽度与所测的距离成正比。由此通过发射信号到收到的回响信号时间间隔可以计算得到距离。公式: uS/58 =厘米或者uS/148= =英寸;或是:距离=高电平时间*声速(340M/S) /2;建议测量周期为60ms以上,以防止发射信号对回响信号的影响。
1.3 模块说明
DE2-115引脚分配如下
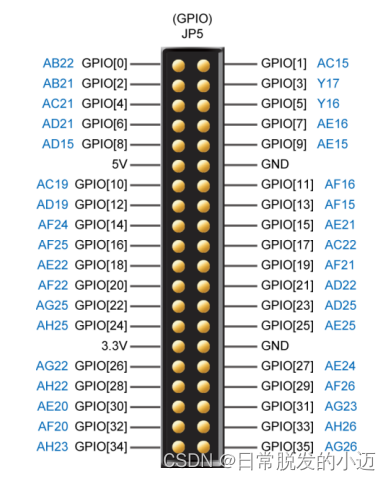
HC-SR04超声波测距模块需要5V供电,其余trigger和echo自由接线,本文使用的是GPIO[0]和GPIO[1]
超声波模块的4个引脚,它们的作用罗列如下:
| 引脚 | 作用 |
|---|---|
| VCC | 电源引脚,超声波模块工作电压为5V。 |
| Trig | 是Trigger(触发)这个单词的缩写,该引脚用于触发超声波脉冲。 |
| Echo | 该引脚会在高电平和低电平之间转换,当检测到障碍物时,在高电平保持的时间就表示信号发射出去并反射回来的时间。 |
| GND | 接地引脚。 |
2 设计文件
2.1 时钟分频
定义时钟分频模块,产生周期为1us的时钟信号
module clk_div(
input wire Clk , //system clock 50MHz
input wire Rst_n , //reset ,low valid
output wire clk_us //
);
//Parameter Declarations
parameter CNT_MAX = 19'd50;//1us的计数值为 50 * Tclk(20ns)
//Interrnal wire/reg declarations
reg [5:00] cnt ; //Counter
wire add_cnt ; //Counter Enable
wire end_cnt ; //Counter Reset
//Logic Description
always @(posedge Clk or negedge Rst_n)begin
if(!Rst_n)begin
cnt <= 'd0;
end
else if(add_cnt)begin
if(end_cnt)begin
cnt <= 'd0;
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin
cnt <= cnt;
end
end
assign add_cnt = 1'b1;
assign end_cnt = add_cnt && cnt >= CNT_MAX - 19'd1;
assign clk_us = end_cnt;
endmodule
2.2 超声波测距
实现HC-SR04超声波传感器的触发模块,用于生成触发测距信号(trig)
module hc_sr_trig(
input wire clk_us , //system clock 1MHz
input wire Rst_n , //reset ,low valid
output wire trig //触发测距信号
);
//Parameter Declarations
parameter CYCLE_MAX = 19'd300_000;
//Interrnal wire/reg declarations
reg [18:00] cnt ; //Counter
wire add_cnt ; //Counter Enable
wire end_cnt ; //Counter Reset
//Logic Description
always @(posedge clk_us or negedge Rst_n)begin
if(!Rst_n)begin
cnt <= 'd0;
end
else if(add_cnt)begin
if(end_cnt)begin
cnt <= 'd0;
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin
cnt <= cnt;
end
end
assign add_cnt = 1'b1;
assign end_cnt = add_cnt && cnt >= CYCLE_MAX - 9'd1;
assign trig = cnt < 15 ? 1'b1 : 1'b0;
endmodule
定义HC-SR04超声波传感器的回声模块,用于测量距离并输出检测距离数据(data_o)
module hc_sr_echo(
input wire Clk , //clock 50MHz
input wire clk_us , //system clock 1MHz
input wire Rst_n , //reset ,low valid
input wire echo , //
output wire [18:00] data_o //检测距离,保留3位小数,*1000实现
);
/* S(um) = 17 * t --> x.abc cm */
//Parameter Declarations
parameter T_MAX = 16'd60_000;//510cm 对应计数值
//Interrnal wire/reg declarations
reg r1_echo,r2_echo; //边沿检测
wire echo_pos,echo_neg; //
reg [15:00] cnt ; //Counter
wire add_cnt ; //Counter Enable
wire end_cnt ; //Counter Reset
reg [18:00] data_r ;
//Logic Description
//如果使用clk_us 检测边沿,延时2us,差值过大
always @(posedge Clk or negedge Rst_n)begin
if(!Rst_n)begin
r1_echo <= 1'b0;
r2_echo <= 1'b0;
end
else begin
r1_echo <= echo;
r2_echo <= r1_echo;
end
end
assign echo_pos = r1_echo & ~r2_echo;
assign echo_neg = ~r1_echo & r2_echo;
always @(posedge clk_us or negedge Rst_n)begin
if(!Rst_n)begin
cnt <= 'd0;
end
else if(add_cnt)begin
if(end_cnt)begin
cnt <= cnt;
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin //echo 低电平 归零
cnt <= 'd0;
end
end
assign add_cnt = echo;
assign end_cnt = add_cnt && cnt >= T_MAX - 1; //超出最大测量范围则保持不变,极限
always @(posedge Clk or negedge Rst_n)begin
if(!Rst_n)begin
data_r <= 'd2;
end
else if(echo_neg)begin
data_r <= (cnt << 4) + cnt;
end
else begin
data_r <= data_r;
end
end //always end
assign data_o = data_r >> 1;
endmodule
2.3 超声波驱动
查看平台手册,发现DE2-115开发板不涉及位选信号,每个段选信号都有一个单独的引脚。
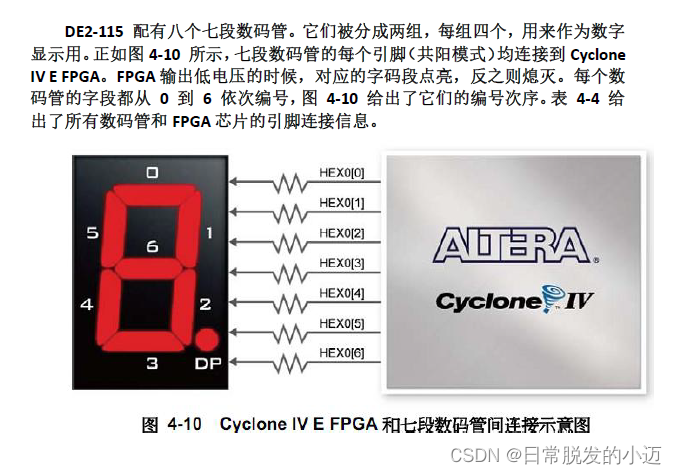

数码管驱动器模块代码如下,用于将输入的数据(data_o)转换为对应的数码管显示:
module seg_driver(
input wire Clk ,
input wire Rst_n ,
input wire [18:0] data_o ,
output wire [6:0] hex1 ,
output wire [6:0] hex2 ,
output wire [6:0] hex3 ,
output wire [6:0] hex4 ,
output wire [6:0] hex5 ,
output wire [6:0] hex6 ,
output wire [6:0] hex7 ,
output wire [6:0] hex8
);
parameter NOTION = 4'd10,
FUSHU = 4'd11;
parameter MAX20us = 10'd1000;
reg [9:0] cnt_20us;
reg [7:0] sel_r;
reg [3:0] number;
reg [6:0] seg_r;
reg [6:0] hex1_r;
reg [6:0] hex2_r;
reg [6:0] hex3_r;
reg [6:0] hex4_r;
reg [6:0] hex5_r;
reg [6:0] hex6_r;
reg [6:0] hex7_r;
reg [6:0] hex8_r;
//20微妙计数器
always @(posedge Clk or negedge Rst_n) begin
if (!Rst_n) begin
cnt_20us <= 10'd0;
end
else if (cnt_20us == MAX20us - 1'd1) begin
cnt_20us <= 10'd0;
end
else begin
cnt_20us <= cnt_20us + 1'd1;
end
end
//单个信号sel_r位拼接约束
always @(posedge Clk or negedge Rst_n) begin
if (!Rst_n) begin
sel_r <= 8'b11_11_11_10;
end
else if (cnt_20us == MAX20us - 1'd1) begin
sel_r <= {
sel_r[6:0],sel_r[7]};
end
else begin
sel_r <= sel_r;
end
end
/*拿到数字*/
always @(*) begin
case (sel_r)
8'b11_11_11_10: number = NOTION ;
8'b11_11_11_01: number = data_o/10_0000 ;
8'b11_11_10_11: number = (data_o%10_0000)/1_0000 ;
8'b11_11_01_11: number = ((data_o%10_0000)%1_0000)/1000 ;
8'b11_10_11_11: number = FUSHU ;
8'b11_01_11_11: number = (((data_o%10_0000)%1_0000)%1000)/100 ;
8'b10_11_11_11: number = ((((data_o%10_0000)%1_0000)%1000)%100)/10 ;
8'b01_11_11_11: number = ((((data_o%10_0000)%1_0000)%1000)%100)%10 ;
default: number = 4'd0 ;
endcase
end
/*通过数字解析出seg值*/
always @(*) begin
case (number)
4'd0 : seg_r = 7'b100_0000;
4'd1 : seg_r = 7'b111_1001;
4'd2 : seg_r = 7'b010_0100;
4'd3 : seg_r = 7'b011_0000;
4'd4 : seg_r = 7'b001_1001;
4'd5 : seg_r = 7'b001_0010;
4'd6 : seg_r = 7'b000_0010;
4'd7 : seg_r = 7'b111_1000;
4'd8 : seg_r = 7'b000_0000;
4'd9 : seg_r = 7'b001_0000;
NOTION : seg_r = 7'b111_1111;
FUSHU : seg_r = 7'b011_1111;
default : seg_r = 7'b111_1111;
endcase
end
always @(*) begin
case (sel_r)
8'b11_11_11_10: hex1_r = seg_r;
8'b11_11_11_01: hex2_r = seg_r;
8'b11_11_10_11: hex3_r = seg_r;
8'b11_11_01_11: hex4_r = seg_r;
8'b11_10_11_11: hex5_r = seg_r;
8'b11_01_11_11: hex6_r = seg_r;
8'b10_11_11_11: hex7_r = seg_r;
8'b01_11_11_11: hex8_r = seg_r;
default: seg_r = seg_r;
endcase
end
assign hex1 = hex1_r;
assign hex2 = hex2_r;
assign hex3 = hex3_r;
assign hex4 = hex4_r;
assign hex5 = hex5_r;
assign hex6 = hex6_r;
assign hex7 = hex7_r;
assign hex8 = hex8_r;
endmodule
3 实验验证
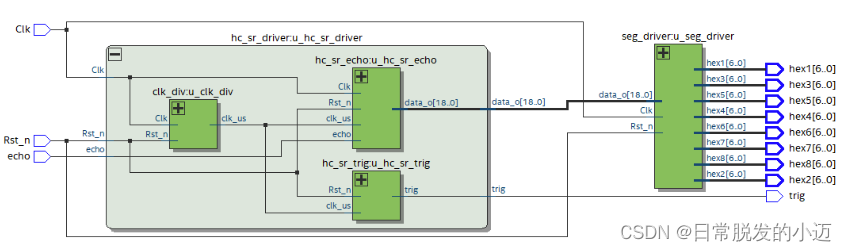
3.1 编译
查看RTL门级电路,如下图:
3.3 硬件测试
引脚绑定:
package require ::quartus::project
set_location_assignment PIN_Y2 -to Clk
set_location_assignment PIN_M23 -to Rst_n
set_location_assignment PIN_AC15 -to echo
set_location_assignment PIN_AB22 -to trig
set_location_assignment PIN_AA14 -to hex1[6]
set_location_assignment PIN_AG18 -to hex1[5]
set_location_assignment PIN_AF17 -to hex1[4]
set_location_assignment PIN_AH17 -to hex1[3]
set_location_assignment PIN_AG17 -to hex1[2]
set_location_assignment PIN_AE17 -to hex1[1]
set_location_assignment PIN_AD17 -to hex1[0]
set_location_assignment PIN_AC17 -to hex2[6]
set_location_assignment PIN_AA15 -to hex2[5]
set_location_assignment PIN_AB15 -to hex2[4]
set_location_assignment PIN_AB17 -to hex2[3]
set_location_assignment PIN_AA16 -to hex2[2]
set_location_assignment PIN_AB16 -to hex2[1]
set_location_assignment PIN_AA17 -to hex2[0]
set_location_assignment PIN_AH18 -to hex3[6]
set_location_assignment PIN_AF18 -to hex3[5]
set_location_assignment PIN_AG19 -to hex3[4]
set_location_assignment PIN_AH19 -to hex3[3]
set_location_assignment PIN_AB18 -to hex3[2]
set_location_assignment PIN_AC18 -to hex3[1]
set_location_assignment PIN_AD18 -to hex3[0]
set_location_assignment PIN_AE18 -to hex4[6]
set_location_assignment PIN_AF19 -to hex4[5]
set_location_assignment PIN_AE19 -to hex4[4]
set_location_assignment PIN_AH21 -to hex4[3]
set_location_assignment PIN_AG21 -to hex4[2]
set_location_assignment PIN_AA19 -to hex4[1]
set_location_assignment PIN_AB19 -to hex4[0]
set_location_assignment PIN_Y19 -to hex5[6]
set_location_assignment PIN_AF23 -to hex5[5]
set_location_assignment PIN_AD24 -to hex5[4]
set_location_assignment PIN_AA21 -to hex5[3]
set_location_assignment PIN_AB20 -to hex5[2]
set_location_assignment PIN_U21 -to hex5[1]
set_location_assignment PIN_V21 -to hex5[0]
set_location_assignment PIN_W28 -to hex6[6]
set_location_assignment PIN_W27 -to hex6[5]
set_location_assignment PIN_Y26 -to hex6[4]
set_location_assignment PIN_W26 -to hex6[3]
set_location_assignment PIN_Y25 -to hex6[2]
set_location_assignment PIN_AA26 -to hex6[1]
set_location_assignment PIN_AA25 -to hex6[0]
set_location_assignment PIN_U24 -to hex7[6]
set_location_assignment PIN_U23 -to hex7[5]
set_location_assignment PIN_W25 -to hex7[4]
set_location_assignment PIN_W22 -to hex7[3]
set_location_assignment PIN_W21 -to hex7[2]
set_location_assignment PIN_Y22 -to hex7[1]
set_location_assignment PIN_M24 -to hex7[0]
set_location_assignment PIN_H22 -to hex8[6]
set_location_assignment PIN_J22 -to hex8[5]
set_location_assignment PIN_L25 -to hex8[4]
set_location_assignment PIN_L26 -to hex8[3]
set_location_assignment PIN_E17 -to hex8[2]
set_location_assignment PIN_F22 -to hex8[1]
set_location_assignment PIN_G18 -to hex8[0]
set_location_assignment PIN_E21 -to led[0]
set_location_assignment PIN_E22 -to led[1]
set_location_assignment PIN_E25 -to led[2]
set_location_assignment PIN_E24 -to led[3]
set_location_assignment PIN_AG26 -to beep
下载测试:
为模拟倒车雷达,同时添加了蜂鸣器指示。小于20cm,1s一响;小于10cm,0.5s一响
该项目源码见:
https://github.com/MiaOuyang/ultrasound_waves
总结
通过实际上板测试,已基本实现超声波测距,所测距离与实际距离基本一致。但由于代码中设计的寄存器位数有限,该代码只能测试到4~247cm左右的距离,同时在使用HC-SR04超声波测距模块进行测距时,常常会遇到一些干扰和误差,例如传感器本身的噪声、回波的多路径传播、环境的干扰等,这些因素可能导致测距结果不准确或者产生错误的距离值,为了减少这些干扰和误差对测距结果的影响,之后将会对测距信号进行滤波处理。
参考文章:
https://blog.csdn.net/qq_43546203/article/details/125281386
https://blog.csdn.net/qq_45659777/article/details/124717655
https://blog.csdn.net/AM0R_/article/details/119303815