1、产品特点:
HC-SR04超声波测距模块可提供2cm-400cm的非接触式距离感测功能,测距精度可达高到3mm;模块包括超声波发射器、接收器与控制电路。
基本工作原理:
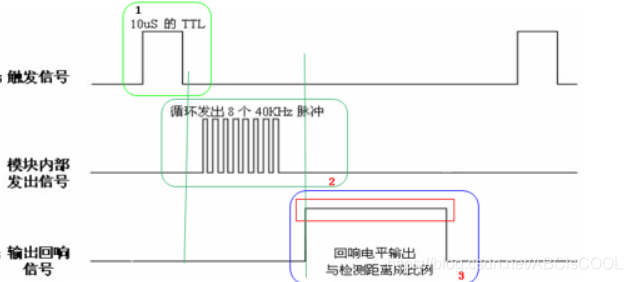
(1)采用IO 口 TRIG触发测距,给最少10us的高电平信号。
(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;(可以简单认为是高电平)
(3)有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2;
注:1、此模块不宜带电连接,若要带电连接,则先让模块的GND端先连接,否则会影响模块的正常工作。
2、测距时,被测物体的面积不少于0.5平方米且平面尽量要求平整,否则影响测量的结果
时序图如下
公式转换原理:
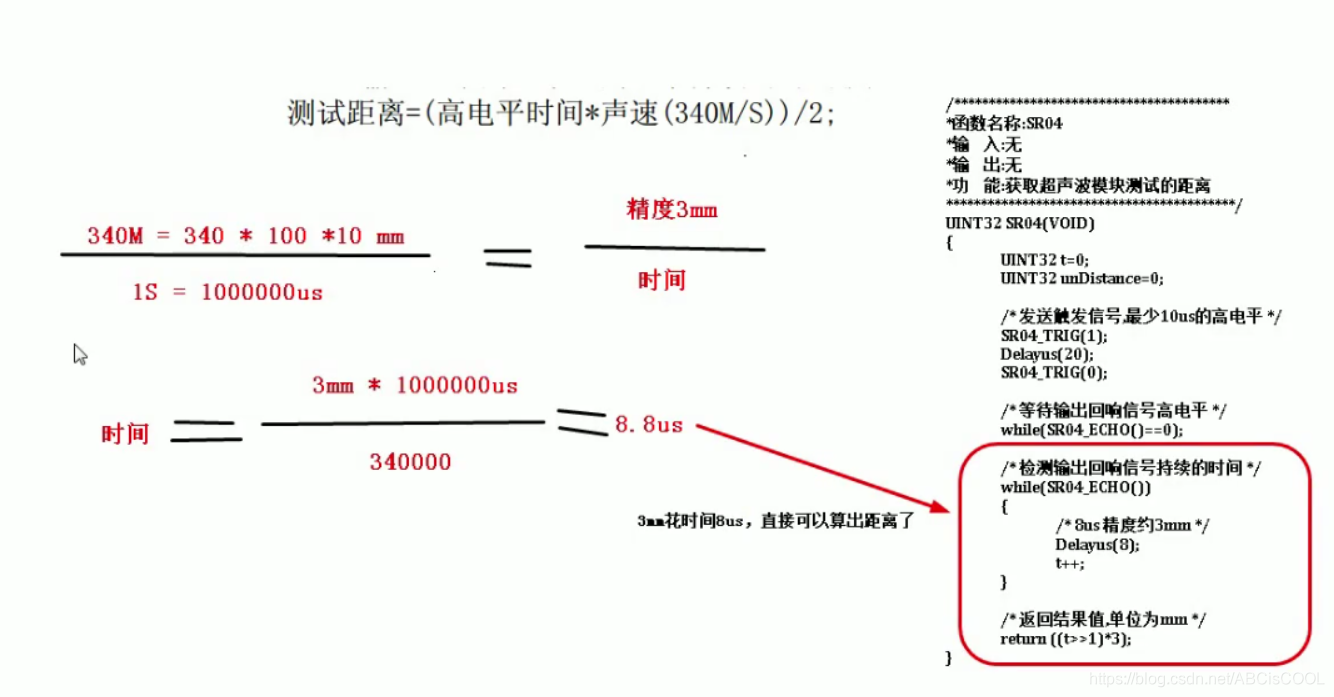
为什么最后是t3呢?
答:因为t/2后是单程的时间,路程=时间速度=t*3mm/s=最终的数值(mm)
拓展:
pwm控制蜂鸣器占空比,下面是例子
#include "stm32f4xx.h"
#include "stm32f4xx_gpio.h"
#include "stm32f4xx_rcc.h"
#include "stm32f4xx_usart.h"
#include "sys.h"
#include "stdio.h"
static GPIO_InitTypeDef GPIO_InitStructure;
static USART_InitTypeDef USART_InitStructure;
static NVIC_InitTypeDef NVIC_InitStructure;
static EXTI_InitTypeDef EXTI_InitStructure;
static TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
static TIM_OCInitTypeDef TIM_OCInitStructure;
static uint32_t g_freq=100,g_duty=50,g_cmp=0;
//重定义fputc函数
int fputc(int ch, FILE *f)
{
USART_SendData(USART1,ch);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
return ch;
}
void delay_us(uint32_t nus)
{
uint32_t temp;
SysTick->LOAD =SystemCoreClock/8/1000000*nus; //时间加载
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //使能滴答定时器开始倒数
do
{
temp=SysTick->CTRL;
}while((temp&0x01)&&!(temp&(1<<16))); //等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
void delay_ms(uint16_t nms)
{
uint32_t temp;
SysTick->LOAD=SystemCoreClock/8/1000*nms; //时间加载(SysTick->LOAD为24bit)
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //能滴答定时器开始倒数
do
{
temp=SysTick->CTRL;
}while((temp&0x01)&&!(temp&(1<<16))); //等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
void LED_Init(void)
{
//使能GPIOE,GPIOF时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE | RCC_AHB1Periph_GPIOF, ENABLE);
//GPIOF9,F10初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //LED0和LED1对应IO口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式,
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出,驱动LED需要电流驱动
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOF, &GPIO_InitStructure); //初始化GPIOF,把配置的数据写入寄存器
//GPIOE13,PE14初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14; //LED2和LED3对应IO口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOE, &GPIO_InitStructure); //初始化GPIOE,把配置的数据写入寄存器
GPIO_SetBits(GPIOF,GPIO_Pin_9 | GPIO_Pin_10); //GPIOF9,PF10设置高,灯灭
GPIO_SetBits(GPIOE,GPIO_Pin_13 | GPIO_Pin_14);
}
void key_exti_init(void)
{
/* GPIOA GPIOE 硬件时钟使能 */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA|RCC_AHB1Periph_GPIOE, ENABLE);
/* 使能 SYSCFG 时钟 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);
/* 配置PA0引脚为输入模式 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //第0根引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN; //输入模式,能够检测外部电平状态
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //GPIO最大的速度为100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //不需要上下拉电阻
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 配置PE2引脚为输入模式 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //第2 根引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN; //输入模式,能够检测外部电平状态
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //GPIO最大的速度为100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //使能内部上拉电阻(可选)
GPIO_Init(GPIOE, &GPIO_InitStructure);
/* Connect EXTI Line0 to PA0 pin */
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA, EXTI_PinSource0);
/* Connect EXTI Line2 to PE2 pin */
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOE, EXTI_PinSource2);
/* Configure EXTI Line0 */
EXTI_InitStructure.EXTI_Line = EXTI_Line0; //使用外部中断控制线0
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //中断事件
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising; //上升沿触发,按键松开的时候就触发中断
EXTI_InitStructure.EXTI_LineCmd = ENABLE; //中断控制线使能
EXTI_Init(&EXTI_InitStructure);
/* Configure EXTI Line2 */
EXTI_InitStructure.EXTI_Line = EXTI_Line2; //使用外部中断控制线2
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //中断事件
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising; //上升沿触发,按键松开的时候就触发中断
EXTI_InitStructure.EXTI_LineCmd = ENABLE; //中断控制线使能
EXTI_Init(&EXTI_InitStructure);
//支持4个抢占优先级,支持4个响应优先级
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/* Enable and set EXTI Line0 Interrupt to the lowest priority */
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //外部中断控制线0中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x03;//抢占优先级0x3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x03; //响应优先级0x3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //外部中断控制线0中断通道使能
NVIC_Init(&NVIC_InitStructure);
/* Enable and set EXTI Line2 Interrupt to the lowest priority */
NVIC_InitStructure.NVIC_IRQChannel = EXTI2_IRQn; //外部中断控制线2中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x3;//抢占优先级0x3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x3; //响应优先级0x3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //外部中断控制线2中断通道使能
NVIC_Init(&NVIC_InitStructure);
}
void tim13_init(uint32_t freq)
{
/* TIM13 clock enable,使能定时器13硬件时钟 */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM13, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
/* 配置PF8引脚为复用功能模式 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //第8根引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能模式,使用引脚的第二功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //GPIO最大的速度为100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //使能内部上拉电阻,增大输出电流的能力
GPIO_Init(GPIOF, &GPIO_InitStructure);
/* Connect TIM13 pins to PF8 */
GPIO_PinAFConfig(GPIOF, GPIO_PinSource8, GPIO_AF_TIM13);
/* Time base configuration,定时器参数的基本配置:定时时间、分频值、计数方法*/
TIM_TimeBaseStructure.TIM_Period =(10000/freq)-1; //设置频率
TIM_TimeBaseStructure.TIM_Prescaler = 8400-1; //预分频值8400
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //二次分频,也就是说再进行一次分频,当前是1分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数的方法
TIM_TimeBaseInit(TIM13, &TIM_TimeBaseStructure);
/* PWM1 Mode configuration: Channel1 */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM模式1,在递增计数模式下,只要 TIMx_CNT<TIMx_CCR1,通道 1 便为有效状态,否则为无效状态。
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //允许输出
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //有效的时候,输出高电平
TIM_OC1Init(TIM13, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM13, TIM_OCPreload_Enable); //自动重载初值,不断输出PWM脉冲
TIM_ARRPreloadConfig(TIM13, ENABLE); //自动重载使能
/* TIM13 enable counter,使能定时器13工作 */
TIM_Cmd(TIM13, ENABLE);
}
void tim13_deinit(void)
{
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Disable; //禁止输出
TIM_OC1Init(TIM13, &TIM_OCInitStructure);
/* TIM13 disable counter,禁止定时器13工作 */
TIM_Cmd(TIM13, DISABLE);
}
void USART1_Init(uint32_t baud)
{
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE); //使能USART1时钟
//串口1对应引脚复用映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1
//USART1端口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10
//USART1 初始化设置
USART_InitStructure.USART_BaudRate = baud; //波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_Cmd(USART1, ENABLE); //使能串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启相关中断
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //串口1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3; //抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
}
void sr04_init(void)
{
//使能GPIOB,GPIOE时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB | RCC_AHB1Periph_GPIOE, ENABLE);
//PB6初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //PB6引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式,
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出,驱动LED需要电流驱动
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化GPIOB,把配置的数据写入寄存器
//PE6初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //PB6引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN; //普通输入模式,
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOE, &GPIO_InitStructure); //初始化GPIOE,把配置的数据写入寄存器
}
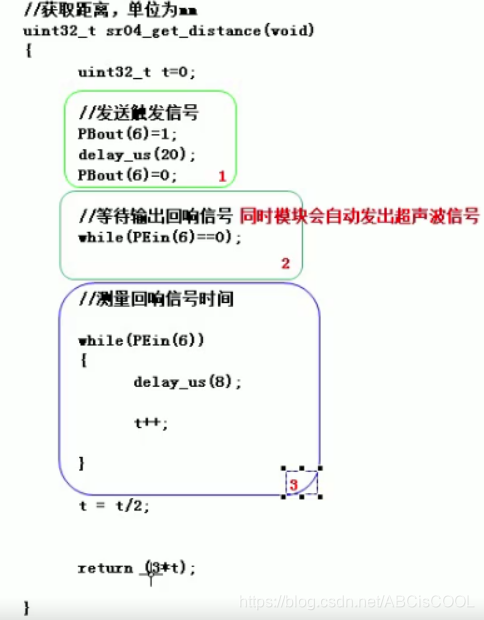
//获取距离,单位为mm
uint32_t sr04_get_distance(void)
{
uint32_t t=0;
//发送触发信号
PBout(6)=1;
delay_us(20);
PBout(6)=0;
//等待输出回响信号
while(PEin(6)==0);
//测量回响信号时间
while(PEin(6))
{
delay_us(8);
t++;
}
t = t/2;
return (3*t);
}
int main(void)
{
uint32_t distance;
LED_Init();
//系统定时器初始化,时钟源来自HCLK,且进行8分频,
//系统定时器时钟频率=168MHz/8=21MHz
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);
//设置中断优先级分组2
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//串口1,波特率115200bps,开启接收中断
USART1_Init(115200);
//初始化超声波模块
sr04_init();
//初始化定时器13
tim13_init(g_freq);
//按键中断初始化
key_exti_init();
while(1)
{
//获取距离
distance = sr04_get_distance();
if(distance>4000)
continue;
//串口显示距离
printf("distance=%dmm\r\n",distance);
delay_ms(500);
//为了方便测试,当前测试距离缩小为原来的一半。
if(distance < 600/2)
{
PFout(9)=0;
PFout(10)=0;
PEout(13)=0;
PEout(14)=0;
//设置频率
g_freq = 600;
tim13_init(g_freq);
//设置占空比
g_cmp = g_freq * g_duty/100;
TIM_SetCompare1(TIM13,g_cmp);
}
else if(distance < 1000/2)
{
PFout(9)=0;
PFout(10)=0;
PEout(13)=0;
PEout(14)=1;
//设置频率
g_freq = 400;
tim13_init(g_freq);
//设置占空比
g_cmp = g_freq * g_duty/100;
TIM_SetCompare1(TIM13,g_cmp);
}
else if(distance < 1400/2)
{
PFout(9)=0;
PFout(10)=0;
PEout(13)=1;
PEout(14)=1;
//设置频率
g_freq = 200;
tim13_init(g_freq);
//设置占空比
g_cmp = g_freq * g_duty/100;
TIM_SetCompare1(TIM13,g_cmp);
}
else if(distance < 1800/2)
{
PFout(9)=0;
PFout(10)=1;
PEout(13)=1;
PEout(14)=1;
//设置频率
g_freq = 100;
tim13_init(g_freq);
//设置占空比
g_cmp = g_freq * g_duty/100;
TIM_SetCompare1(TIM13,g_cmp);
}
else
{
PFout(9)=1;
PFout(10)=1;
PEout(13)=1;
PEout(14)=1;
//蜂鸣器停止工作
tim13_deinit();
}
}
}
void EXTI0_IRQHandler(void)
{
//检查外部中断控制线0是否真的触发中断
if(EXTI_GetITStatus(EXTI_Line0)== SET)
{
if(g_duty>=10)
{
g_duty-=10;
printf("duty=%d\r\n",g_duty);
}
/* Clear the EXTI line 0 pending bit */
EXTI_ClearITPendingBit(EXTI_Line0);
}
}
void EXTI2_IRQHandler(void)
{
//检查外部中断控制线2是否真的触发中断
if(EXTI_GetITStatus(EXTI_Line2)== SET)
{
if(g_duty<100)
{
g_duty+=10;
printf("duty=%d\r\n",g_duty);
}
/* Clear the EXTI line 2 pending bit */
EXTI_ClearITPendingBit(EXTI_Line2);
}
}
void USART1_IRQHandler(void) //串口1中断服务程序
{
uint8_t d;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断
{
//接收数据
d = USART_ReceiveData(USART1);
//发送数据
USART_SendData(USART1,d);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
}
}
sys.h
#ifndef __SYS_H__
#define __SYS_H__
//位带操作,实现51类似的GPIO控制功能
//IO口操作宏定义
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010
//IO口操作,只对单一的IO口!
//确保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入
#define PHout(n) BIT_ADDR(GPIOH_ODR_Addr,n) //输出
#define PHin(n) BIT_ADDR(GPIOH_IDR_Addr,n) //输入
#define PIout(n) BIT_ADDR(GPIOI_ODR_Addr,n) //输出
#define PIin(n) BIT_ADDR(GPIOI_IDR_Addr,n) //输入
#endif