参考资料:
https://www.icourse163.org/course/ISCAS-1002580008?tid=1003713012 //中国大学MOOC
https://www.bilibili.com/video/av23401751 //B站
《ROS操作系统入门讲义》PDF下载
链接:https://pan.baidu.com/s/1OCja2WLDRnjYXMrpnZ3-sQ
提取码:mziy
第四章 ROS通信架构(二)
一、Service 服务 //适用于临时的、非周期性的数据

(1)同步通信:Node A发布请求后会在原地等待reply(阻塞状态),直到Node B处理完了请求并且完成了reply,Node A才会继续执行
(2)topic VS service
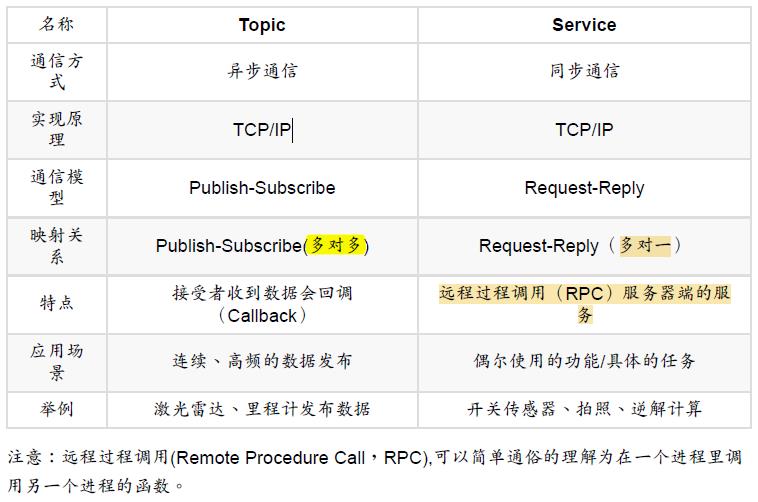
注:service是不能重名的,一个service只能由一个server提供
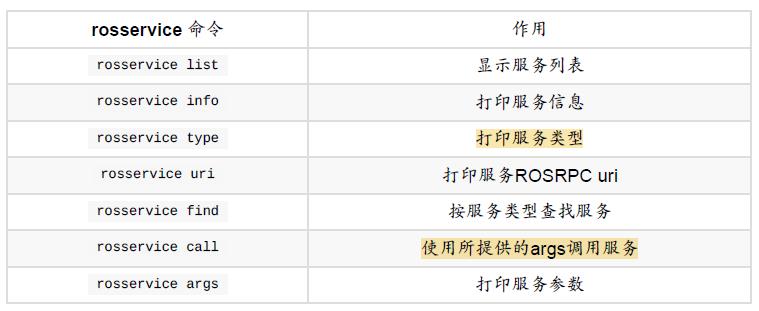
(3)常用命令 //注意与 rossrv 的区别
二、 srv //和msg文件类型,srv文件是用来描述服务service的通信数据格式
1. 示例 msgs_demo/srv/DetectHuman.srv //查询当前深度摄像头中的人体姿态和关节数
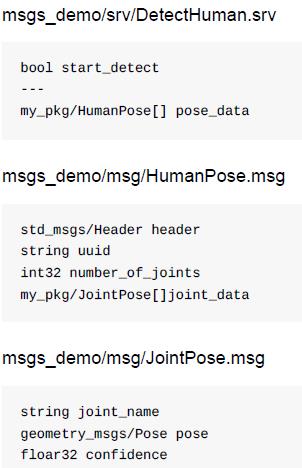
(1)srv文件以 --- 隔开请求和应答,上方为请求,下方为应答;本例中请求为请求为是否开始检测,应答为一个数组,数组的每个元素为某个人的姿态(HumanPose)
(2)srv可以嵌套msg,但不能嵌套srv;本例中HumanPose为嵌套的msg
三、参数服务器 //参数服务器是节点存储参数的地方,用于配置全局共享参数
1. “特殊”的通信方式:使用互联网传输,在节点管理器中运行
2. 参数服务器维护一个数据字典,字典内存储各个参数和配置,更加静态
3. 维护方式
(1)命令行维护:使用 rosparam 命令
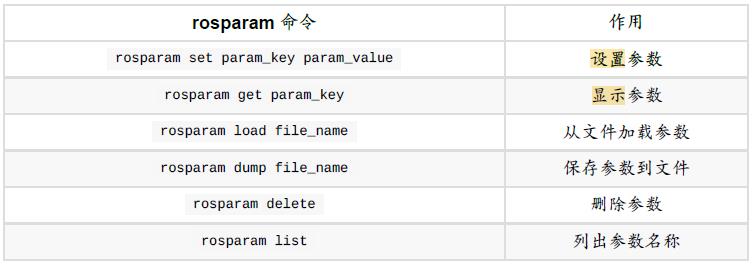
注:load和dump的文件需要遵守YAML格式,即“名称 + :+ 值” //可以理解为键值对的字典

(2)launch文件内读写:<param>标签和<rosparam>标签
- <param name="publish_frequency" value="100.0"/> //直接给出值value
- <param name="robot_description" command="$(find xacro)/xacro.py $(find robot_sim_demo)/urdf/robot_xacro"/> //值由脚本运行结果给定
- <rosparam file="$(find robot_sim_demo)/config/xbot2_control.yaml" command="load"/> //先指定YAML文件,再施加command,等价于 rosparam load file_name
(3)node源码:利用API对参数服务器进行操作
4. 参数类型:ROS参数服务器为参数值使用XMLRPC数据类型,其中包括:strings, integers, floats, booleans, lists, dictionaries, iso8601 dates, and base64-encoded data
四、Action //适合长时间的通信过程,且需要知道状态和结果的场景,可以随时查看过程进度(反馈),也可以终止请求
1. 通信接口

注:客户端会向服务器发送目标指令和取消动作指令,而服务器则可以给客户端发送实时的状态信息、结果信息和反馈信息等
2. Action规范文件.action格式

注:由 --- 分隔开动作的三部分内容,从上到下分别为 目标、结果、反馈