1 Introduction
The term robot means different things to different people. Sadly the practice of robotics is far behind this popular conception.
The first patent for what we would now consider a robot was filed in 1954 by George C. Devol and issued in 1961. The first robotics company, Unimation, was founded by Devol and Joseph Engelberger in 1956 and their first industrial robot shown in Fig. 1.2 was installed in 1961. 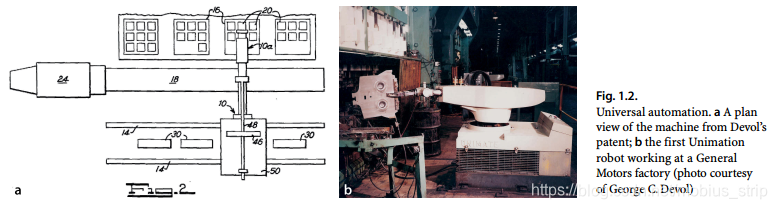
These first generation robots are now a subclass of robotics known as manufacturing robots. ve the physical form of a human being. A manufacturing robot is typically an arm-type manipulator on a fixed base that performs repetitive tasks within a local work cell. Parts are presented to the robot in an orderly fashion which maximizes the advantage of the robot’s high speed and precision. High-speed robots are hazardous and safety is achieved by excluding people from robotic work places.
Field and service robots face specific and significant challenges. The first challenge
is that the robot must operate and move in a complex, cluttered and changing environment. The second challenge for these types of robots is that they must operate safely in the presence of people.
So what is a robot? There are many definitions and not all of them are particularly helpful. A definition that will serve us well in this book is a goal oriented machine that can sense, plan and act.
A camera is a passive captures patterns of energy reflected from the scene. An important limitation of a single camera is that the 3-dimensional structure must be inferred from the 2-dimensional image. An alternative approach is stereo vision, using two or more cameras, to compute the 3-dimensional structure of the world.