非线性微分跟踪器的Matlab仿真
非线性跟踪微分器
实际工程问题中,测量信号经常不连续或者带随机噪声,需要提取连续信号和微分信号。比如PID调节中,需要由不连续的参考输入信号合理提取微分信号;编码器速度检测时,由数字的绝对位移信号提取出速度信号,或者速度信号提取加速度信号等等。当然可以采用线性微分器或者线性滤波等手段,然而“线性”办法可能还不能解决问题时,这里介绍“非线性”的方法,利用二阶最速开关系统构造出跟踪不连续输入信号并提取“近似微分”的“机构”。
非线性跟踪微分器的一般形式

的任意解都满足 z1 ->0, z2 ->0 (t->无穷)时,则对任意有界可积函数v(t) 和任意常数T > 0,系统
的解都满足
详细见[1]

MATLAB仿真
离散微分跟踪器的MATLAB仿真

Matlab代码
function y=fst(x1,x2,u,r,h)
deta=r*h; %h为步长 周期 r为调节系数,r越大跟踪效果越好,但微分信号会增加高频噪声
deta0=deta*h; %反之,微分信号越平滑,会产生一定的滞后
y=x1-u+h*x2;
a0=sqrt(deta^2+8*r*abs(y));
if abs(y)<=deta0
a=x2+y/h;
else
a=x2+0.5*(a0-deta)*sign(y);
end
if abs(a)<=deta
y=-r*a/deta;
else
y=-r*sign(a);
end
% matlab 噪声信号仿真
clear
close all
r=10;
h=0.01; %执行步长
u_1 = 0;
x1(1)=0;
x2(1)=0;
ts = h;
for k=1:1000
time(k)=ts*k;
dv(k) = cos(time(k)); %理想的微分信号
u(k)=sin(time(k)) + 0.01*rands(1); %加入噪声
x1(k+1)=x1(k)+ts*x2(k);
x2(k+1)=x2(k)+ts*fst(x1(k),x2(k),u(k),r,h);
du(k) = (u(k) - u_1)/ts; %一般的差分计算
u_1 = u(k);
end
x1(end)=[];
x2(end)=[];
figure();
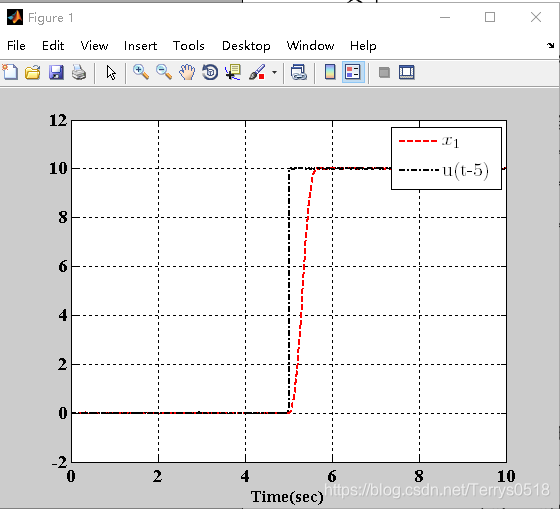
plot(time,x1,'r--',time,sin(time),'k-.','linewidth',2);
grid on
xlabel('Time(sec)','FontName','Times New Roman','FontSize',12,'FontWeight','bold')
h = legend('$x_1$','$sin$ ');
set(h,'Interpreter','latex','fontsize',14,'FontName','Times New Roman','fontweight','bold')
set(gca,'FontWeight','bold','fontsize',14,'FontName','Times New Roman')
figure();
plot(time,x2,'r-',time,du,'b.',time,dv,'k-','linewidth',2);
grid on
xlabel('Time(sec)','FontName','Times New Roman','FontSize',12,'FontWeight','bold')
h = legend('$x_2$','diff','cos'); %微分跟踪,差分跟踪,理想信号
set(h,'Interpreter','latex','fontsize',14,'FontName','Times New Roman','fontweight','bold')
set(gca,'FontWeight','bold','fontsize',14,'FontName','Times New Roman')
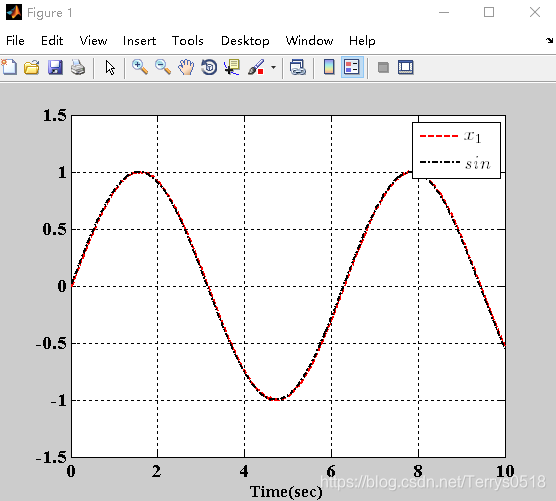
仿真 r = 50 T=0.01
sin为原信号,x1为跟踪信号。
cos为理想信号,x2为微分跟踪信号,diff为用简单差分计算出的微分信号。
仿真 r = 10 T=0.01
sin为原信号,x1为跟踪信号。
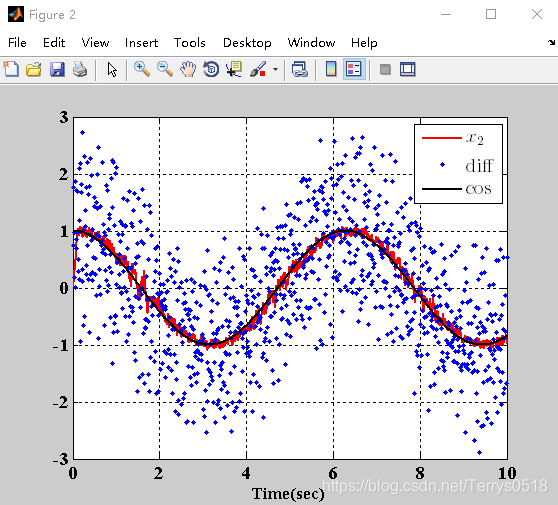
cos为理想信号,x2为微分跟踪信号,diff为用简单差分计算出的微分信号。
仿真 r = 100 T=0.01 对阶跃信号 10u(t-5)的仿真

简单结论
相比于原来的 一般差分计算微分的方法,使用微分跟踪器能有效抑制测量信号的噪声干扰,而且零点不产生振荡,也方便调节。
以上信号的分析可得,跟踪效果要好,R要大,但R过大会给微分信号增加高频噪声。
离散微分器可方便改写成C语言,可广泛用于PID控制,信号滤波等场合
[1]:《《非线性跟踪器-微分器》 韩京清 王伟 著》
[2]:https://blog.csdn.net/miracle_fans/article/details/78223203