1. 导出urdf
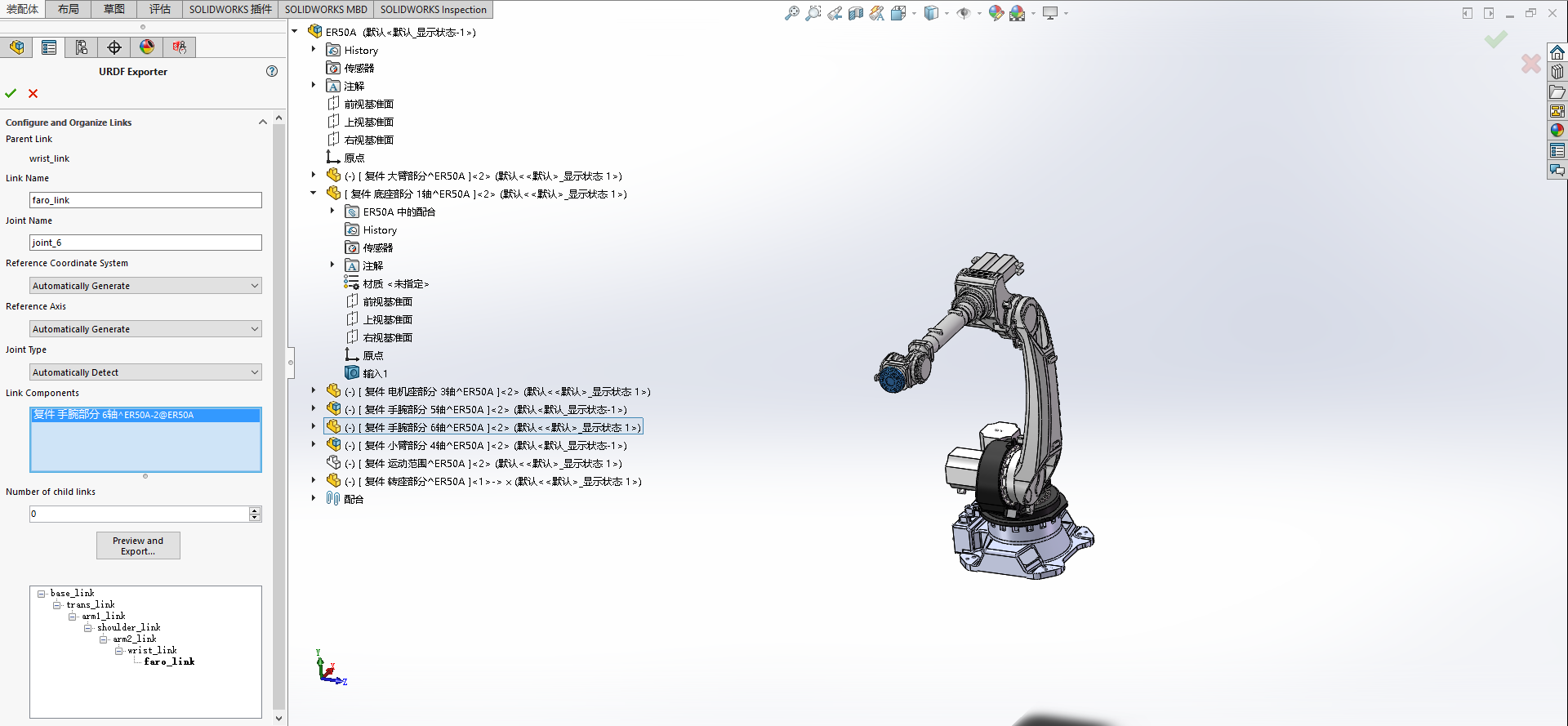
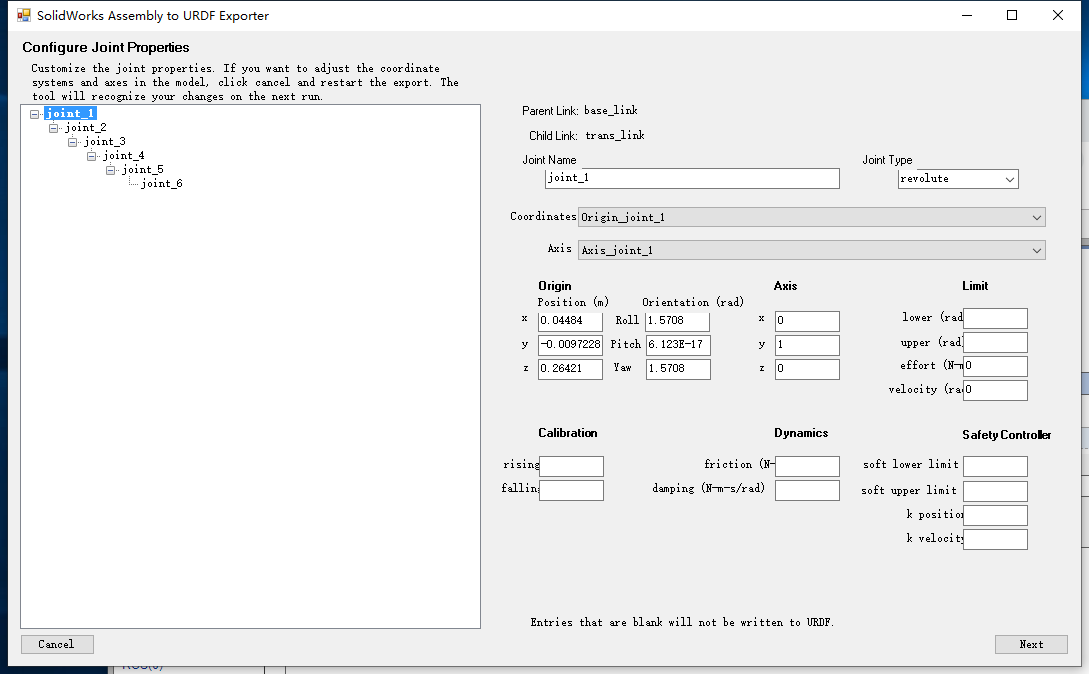
自动生成的坐标系和轴线未必完全符合要求,需要自己添加坐标系/轴线或者自己修改相应的xyz/rpy值。
2. 制作moveit
source devel/setup.zsh # roslaunch之前source,ros知道description包的存在,若使用bash,则调用 source devel/setup.bash
roslaunch moveit_setup_assistant setup_assistant.launch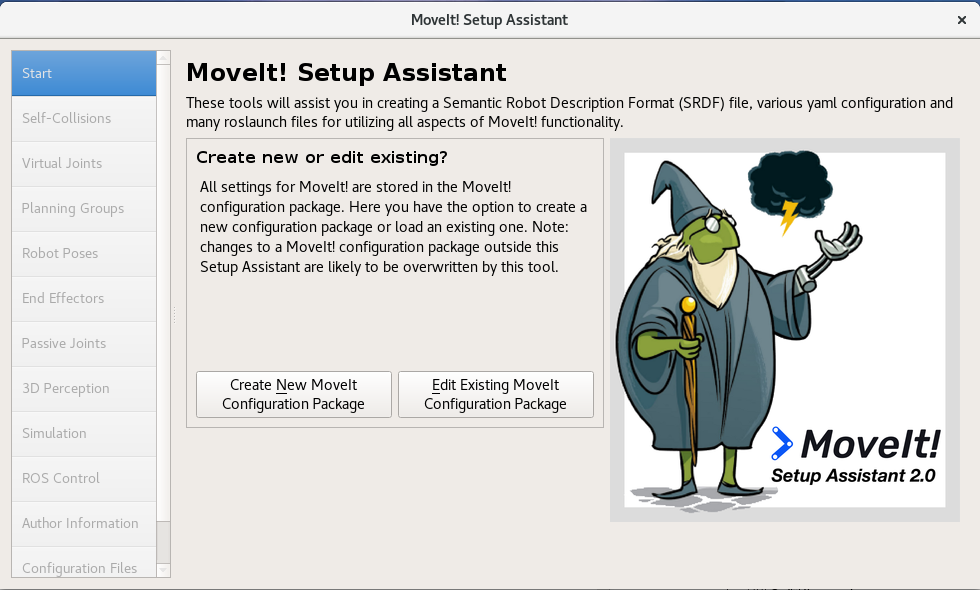
自动生成的坐标系和轴线未必完全符合要求,需要自己添加坐标系/轴线或者自己修改相应的xyz/rpy值。
source devel/setup.zsh # roslaunch之前source,ros知道description包的存在,若使用bash,则调用 source devel/setup.bash
roslaunch moveit_setup_assistant setup_assistant.launch