原文链接:http://arxiv.org/pdf/1607.07032v2.pdf
源码链接:https://github.com/zhangliliang/RPN_BF/tree/RPN-pedestrian
简介:行人检测是个特定课题,而不是一般的物体检测。虽然最近流行的深度物体检测方法 如: Fast/Faster RCNN 在一般的物体检测中,取得了比较理想的结果,但是在行人检测方面却不太成功。论文研究了 Faster RCNN 在行人检测中存在的问题,发现 RPN 在单独的行人检测器中表现良好,但是随后的分类器却降低了性能。论文作者猜想可能是如下两个原因导致的:
1)行人在图像中的尺寸较小。对于小物体,RoI池化层在低分辨率特征图(其实就是最后共享的特征图)中提出的特征没有什么区分能力(太小以至于特征消失)。针对该情况,论文在更大尺寸的浅层特征上提取特征,以此提高提出特征的区分能力。
2)行人检测中的FP(假阳性)主要是背景的干扰,而一般物体检测主要受多种类影响。对此论文使用了 cascaded Boosted Forest 直接训练 RPN 提出的深度卷积特征。
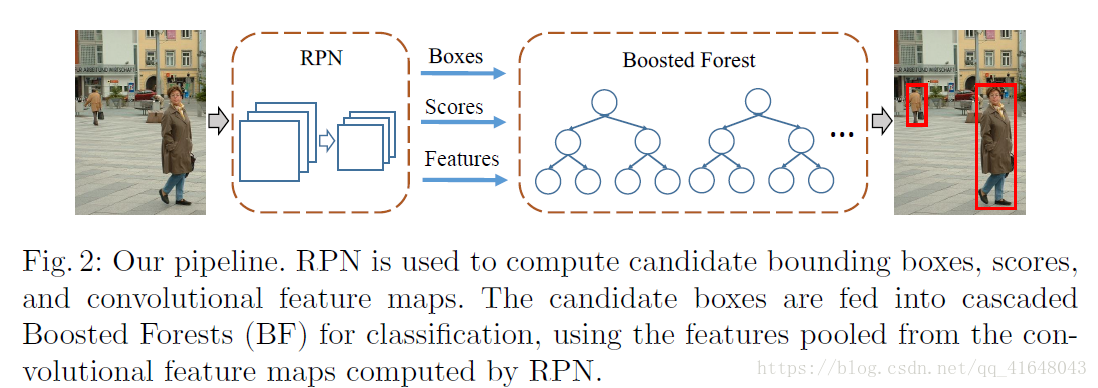
实现方法:论文的方法主要包含两部分:一是用于生成候选框及卷积特征映射的RPN;二是使用这些卷积特征对候选框进行分类的Boosted Forest。具体实现如下:
1)行人检测的RPN网络采用单横纵比0.41(行人平均宽高比),从40像素高度开始步长为1.3× 的9个尺度的锚。
2)从RoI提取的固定长度的特征输入到BF分类器,不对维数做任何限制。在特征提取阶段还使用àtrous技巧来计算分辨率更高的卷积特征映射。
3)BF采用AdaBoost算法。其中RPN看作stage-0的分类器f_0,采用RealBoost设置f_0, f_0=0.5×log(s/(1-s)),其中s是提议区域的分数。
实现结果:
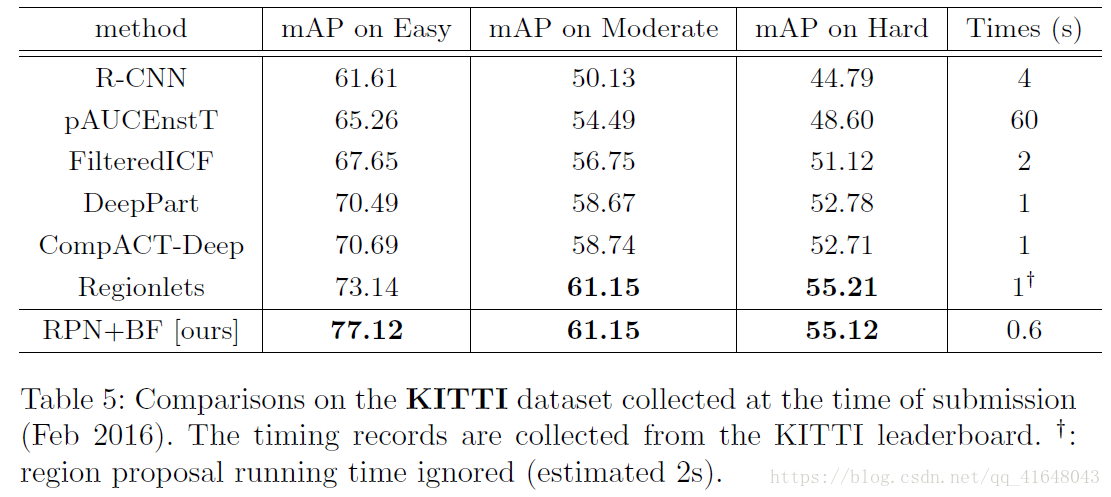
由于我所需仅为KITTI数据集下的结果,所以这里只放了KITTI的结果。
从上表可以看出论文提出的方法对于提升行人检测的性能还是很有效的。
参考:https://blog.csdn.net/cv_family_z/article/details/52397122