版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/sss_369/article/details/60337344
参考文献:
一种扩展小孔成像模型的鱼眼相机矫正与标定方法
鱼眼相机:
优势:超宽的视场范围 (Field of view, FOV) (可以达到 180◦ 以上), 被广泛应用.
成像原理:一般的相机都是基于小孔成像原理。
常规的基于小孔成像模型的相机矫正与标定算法在超宽视场的鱼眼成像系统中已经不太适用。
原因:由于小孔成像模型适用的视场范围远小于180◦(一般适用于 90◦ 左右视场范围), 而鱼眼相机
具有超宽的视场角 (一般达到甚至超过 180◦), 不能够简单地使用小孔成像模型进行鱼眼相机的矫正与标定.
基于小孔成像模型的矫正与标定原理
小孔成像模型功能:将空间中的点投影到图像平面。
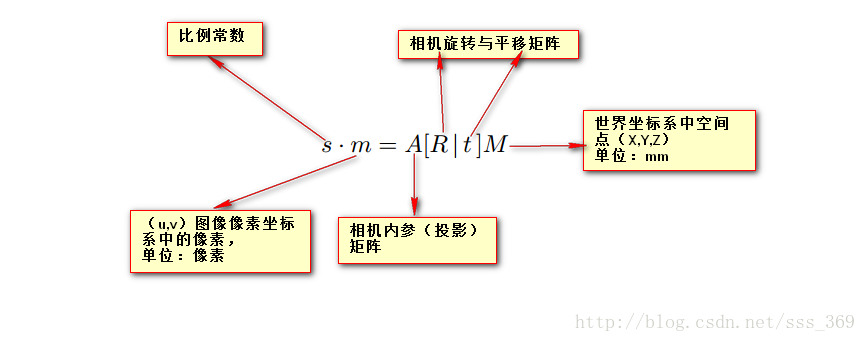
投影公式:
1、
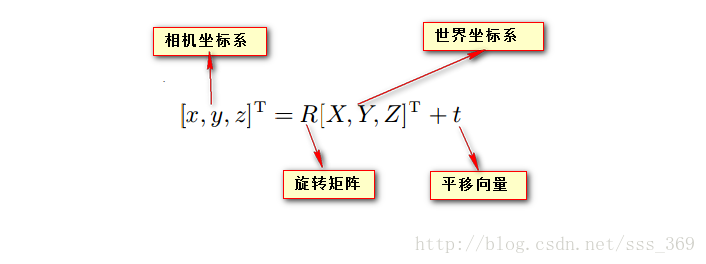
2、引入(x,y,z)为中间变量:
坐标系变换:
世界坐标系–>相机坐标系;
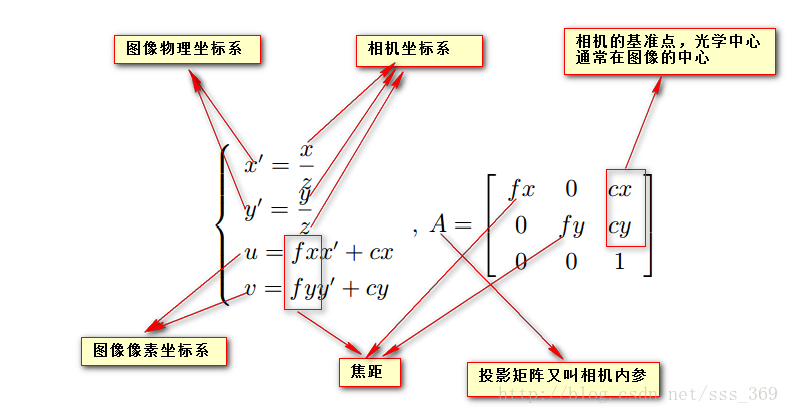
相机坐标系–>图像物理坐标系;
图像物理坐标系–>图像像素坐标系;
3、相机畸变:
对于鱼眼相机, 存在比较严重的畸变,
主要是径向形变(普通相机也有), 也会有轻微的切向形变.
但是, 根据鱼眼镜头桶形畸变的特点, 在鱼眼图像的中间区域畸变较小, 可以采用低阶的多项式拟合其畸变参数.

Levenberg-Marquadt (LM) 算法
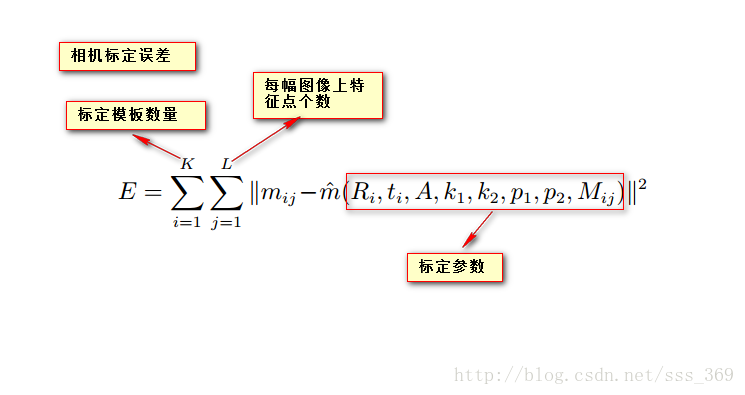
4、相机标定步骤:
①材料:棋盘格
②从不同角度拍摄棋盘模板图,得到一系列模板图像,一般为15-20副图。
③通过角点检测,提取图像中的特征点的像素坐标,按照小孔成像模型,建立空间点和像素角点之间的关系。
④通过收敛性强的Levenberg-Marquadt (LM) 算法求取标定参数。实现相机的标定。
转载请注明出处。
http://blog.csdn.net/sss_369/article/details/60337344