论文:2013IROS论文,Unified Temporal and Spatial Calibration for Multi-Sensor Systems,是Kalibr工具的参考论文之一。介绍了如何进行IMU与相机标定。
参考的一篇资料:知乎:超全汇总!多传感器离线/在线时空联合标定方法
理论依据
这篇论文的基础是,2012ICRA的论文,Continuous-Time Batch Estimation using Temporal Basis Functions。这篇论文的核心思想:如果求解状态量x(t)不可观,则将x表示成一系列解析函数做为基函数的线性组合: x ( t ) : = Φ ( t ) c x(t):=\Phi(t)c x(t):=Φ(t)c,其中 Φ ( t ) = [ ϕ 1 ( t ) , . . . ϕ M ( t ) ] \Phi(t)=[\phi_1(t),...\phi_M(t)] Φ(t)=[ϕ1(t),...ϕM(t)]为basis funceion或称作analytical function是已知的, c c c是常系数。此时,我们将求解状态 x ( t ) x(t) x(t)变成了求解系数 c c c。
求解 c c c 采用优化方法,即定义误差项 e j : = y j − h ( x ( t j + d ) ) e_j:=y_j-h(x(t_j+d)) ej:=yj−h(x(tj+d)),其中 y i y_i yi为实际值, h h h为观测模型, t j t_j tj为 j 时刻, d d d为时间上的延迟。
IMU与相机标定
下面开始涉及IMU的相关内容。作者指出,对于IMU相机标定,先后先要明确需要标定的状态,包括时变的(IMU位姿、加计陀螺仪的随机游走)和时不变的(重力方向、相机IMU外参、时间延迟),同时解析函数即为B样条插值B-spline后的6自由度位姿(3旋转3平移)。
我们先看需要表达的观测方程:
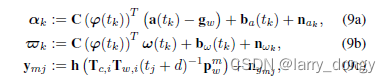
其中 p w m p_w^m pwm为第m个观测再world系的坐标, w ( t k ) , a w(t_k), a w(tk),a为实际的角速度和加速度,具体的表达式均通过6自由度B-Spline得到:

最后定义了一些误差项 e { ⋅ } e_{\{\cdot\}} e{ ⋅} 和 对应加权后的值 J { ⋅ } J_{\{\cdot\}} J{ ⋅},
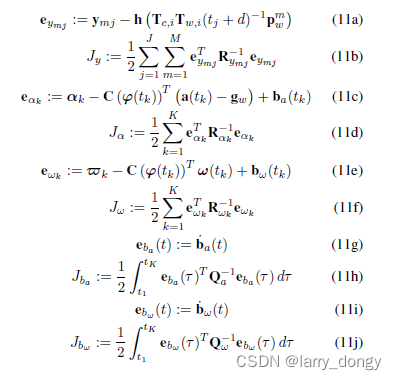
再把他们扔到一起进行优化, J : = J y + J α + J w + J b a + J b w J:=J_y+J_\alpha+J_w+J_{b_a}+J_{b_w} J:=Jy+Jα+Jw+Jba+Jbw,便可得到所有状态量。