这一次开第六章,Temporal-Difference 方法,简称TD,可以翻译为瞬时差分法。
TD方法在强化学习算法中有很重要的地位,因为它是一个集大成的算法。TD综合了第五章所说的蒙特卡洛算法和第四章所说的DP算法的特点,既可以从真实经验序列学习,无需环境模型,又可以根据已得到的估计值来更新新的估计值(bootstrap)。这是目前我们需要在脑海中构建的关于TD的一个基本特征。
但是虽然TD综合了蒙特卡洛和DP的特点,终归也有区别。区别在哪?区别在于policy evaluation(也叫做prediction)的过程,也就是根据某一个policy 不断更新其对应的value function
的过程。熟悉前面内容的读者们肯定知道,policy evaluation之后还有一个policy improvement(也叫做control)过程,在这个过程中,TD、monte carlo、DP则没有太大的区别,都是采取基于generalized policy iteration (GPI) 的一些变体。因此,我们接下来重点关注它们在policy evaluation过程的区别。
6.1 TD Prediction
我们先来比较一下TD prediction过程和蒙特卡洛 prediction过程的区别:
首先上一个公式:
上式体现了蒙特卡洛算法的value更新规则,我们叫做constant- 蒙特卡洛算法。这里我们暂且不考虑多个episode之后的平均化操作,仅就一个episode来说,里面出现的每一个
对应的value,需要根据这个episode彻底结束之后得到的
来更新,注意这里的重点是“等待episode结束”。
再来看TD的更新规则公式(具体应该是TD(0)算法,TD类算法中的其中一种:
找不同,发现前面的被换成了
,这就是区别所在。也就是说,TD算法“不等到episode结束”,而是在下一个时间点,就拿刚刚得到的reward信息和之前
的estimate来更新
了。敏感的读者在这里好像还会嗅到一丝DP的含义:拿之前的估计值作为基准,估计新的值,是不是bootstrap!也是DP最大的一个特点。这就是为什么说TD综合了蒙特卡洛和DP的特点。
为了更好地说明,再来一个公式:

这是第三章讲贝尔曼方程时的公式。可以看出,蒙特卡洛算法是把(1)作为估计目标,然而expect return是不知道的,因此蒙特卡洛算法用每个样本的return来近似代替;DP把(2)作为估计目标,然而是不知道的,于是就拿之前的估计值代替;TD则是两个方式都用了:首先它用了采样的方式来算(2),其次用之前的估计值
来代替真实的
。
下面给出TD(0)的伪代码:
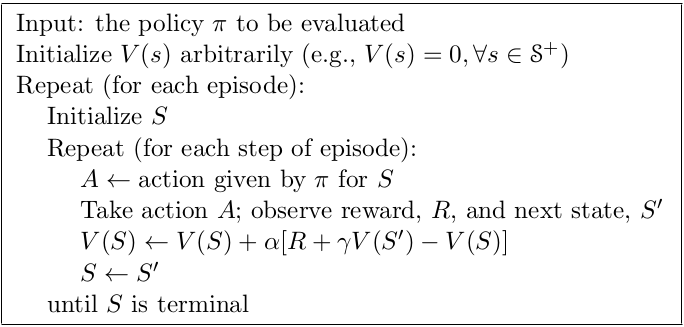
从back-up方式来看,DP使用的是full-backup,它基于所有可能的后续状态分布;而蒙特卡洛和TD使用的是sample back-up,它只基于当前发生的唯一的后续转移情况。
6.2 Advantages of TD Prediction Methods
这一小节讨论一下TD的优点。TD集成了蒙特卡洛和DP的特点,但是这种集成是好是坏呢?有什么优势呢?
首先有一点很明显,就是TD比DP是有优势的:不需要环境建模,不需要那些复杂的转移概率。其次,TD比蒙特卡洛有优势的一点是TD无需等待episode结束,可以实时计算。这一点非常重要,因为有时候一个episode会特别长,或者对于连续性任务来说,压根就没有episode,这时候TD的即时性就非常重要。
但是这样就代表TD算法是可靠的吗?虽然TD保证了即时性,那么它有没有保证正确性呢?幸运的是这一点是成立的。当上面的step-size parameter 恒定且足够小或者逐渐递减但是满足随即近似理论,最终的结果都是可以保证收敛的。随机近似理论第二章提到过:
随之而来的问题是:如果TD和蒙特卡洛算法都能最终收敛,那么谁更快呢?事实上,没有理论证明谁更快,但是在实际的随机任务中,通常TD会更快一点。
我们在此给出一个例子,直观感受一下TD和MC的算法特点。
『例』
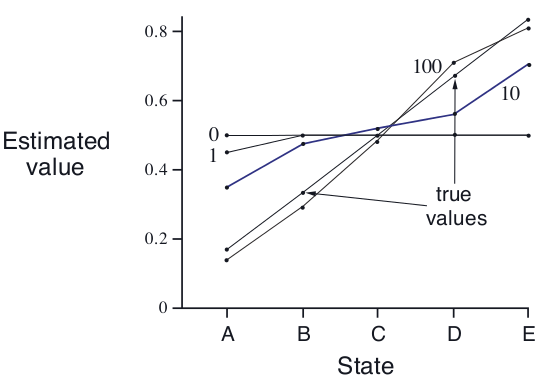
我们把这个例子叫做“random walk”,随机走动,从C开始出发,往左往右走的概率相同,只有到达最右侧reward是1,其他状态都是0。为了直观比较这两种算法对于value function的估计值和真实值的误差,我们需要知道真实value。這個例子故意特殊设计,使真实value很好算:每个状态的真实value就是从该状态起,到达最右侧的概率。于是;
;
;
;
。一些实验结果如下:
上图是固定
情况下,随着episode数量增加,TD的估计值逐渐逼近真实值。
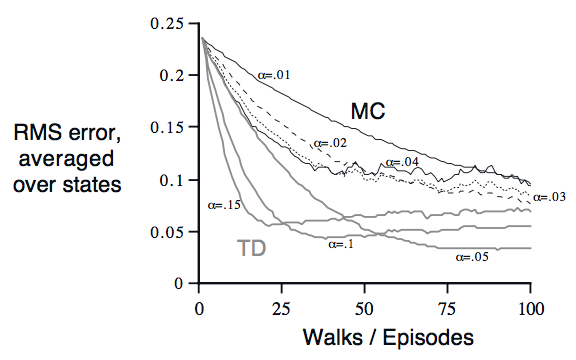
下图是当取不同的时,TD和constant-

6.3 Optimality of TD(0)
这一节讨论一下TD(0)算法最优解的特点以及和蒙特卡洛最优解的比较
(ps:这一节说的TD都特指TD(0)算法,MC都特指constant-蒙特卡洛算法)
在之前我们谈到的两种算法的更新规则都是单次的,也就是说,对于MC算法,每个episode结束之后更新一次value;对于TD,每个time step都更新一次相应state的value。根据前面的random walk案例,可以看出随着的不同,MC和TD每次的收敛结果都不一样,我们先记住这个结论,后面要对比。
现在我们引入另外一种更新规则:“batch updating”。因为在实际问题中有时并没有很多episodes,很可能我们手里就只有十几个episodes,这个时候,如何进行TD或者蒙特卡洛呢?我们可以把所有这一批episodes中关于每个state的更新增量,全部算完加和,然后更新一次value function。然后再走一遍所有的episodes,用新的value function再算一次增量和,再更新一次value function,直到value 收敛。
注意,注意,在这种“batch updating”操作下,TD算法的收敛结果却不受stepsize 的影响,只要
足够小,每次batch updating的结果都一样,这个结论和前面TD在常规更新规则下的结论不一样。但是在constant-
蒙特卡洛算法中,收敛结果在两种更新规则下均不确定。为了更好地理解这两种不同的结论,我们看两个例子,一步步来解释清楚两种算法背后的机制的不同。
「例1」“batch updating”版本的random walk 在“batch updating”版本的“random walk”游戏里,有一点很不一样:每一个新产生的episode,都会和之前所有经过的episodes一起算作新的batch,然后整体更新value。这个更新设置是为了凸显MC和TD之间某种本质的不同。
下图给出了这种更新情况下,MC(蒙特卡洛)算法和TD算法的收敛误差比较,可以直观看出,TD全方位无死角秒杀MC:RMS error指的是“root mean-squared error”,也就是“均方根误差”。从图中可以看出,随着新加入的episode不断增加,TD的效果一直保持比MC强。
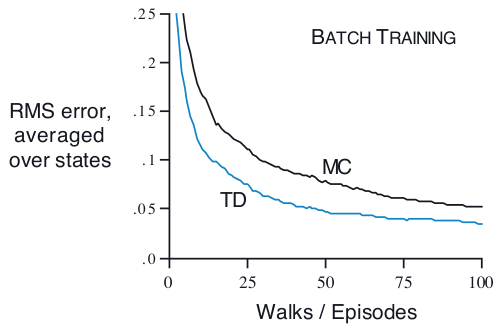
在batch updating操作下,从不断减小估计值和真实训练数据之间的误差这个角度来说,MC的value估计可以说是最优的。但是很明显TD的效果一直比MC好,为什么TD竟然能比MC的最优估计还要好?原因是MC的最优是有限制的,而TD的最优更适合这种“不断添加新数据”的更新规则。
为了更好地说明上述结论,我们再来看一个例子:
「例2」
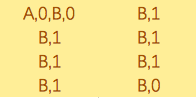
假如我们有8个短episode,分别是拿第一个来说,就是A状态转移到B状态,reward是0,B状态转移到终止状态,reward也是0。现在问题是V(A),V(B)分别是多少?很显然,V(B)=3/4,这个毫无疑问,但是V(A)呢?有的人说既然A状态转移到B状态的概率是100%,而B状态的value是3/4,那么毫无疑问,A状态的value也是3/4。完美!看起来是对的,还有别的答案吗?有的人又说了,V(A)也可能是0啊,因为根据MC的算法,所有的episode中,从A开始到episode结束的return就是0啊。嗯,也没问题啊。
那么这两个V(A),究竟那个是对的?
答案是:都对,只是做法不同而已。前者是TD的做法,后者是MC的做法。
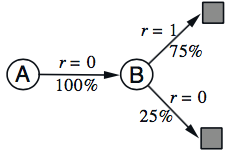
我们进一步仔细讨论一下。对于前者,其思路是这样的:
注意到这个图其实就是第三章提到的马尔可夫状态转移图。知道了V(B),构造了状态之间的转移关系,得到V(A),这其实对应的就是之前TD(0)公式的“差分”部分:

对于后者,思路就是按照正常MC算法,算出真实return的均值,为0。诚然,在这个例子中,MC得到的估计值和真实值之间的误差是0,貌似是理想的。可是,面对新加入的episode,当进行“batch updating”时,你愿意得到那个答案呢?其实第一个才是更合理的, 尽管它在当前的误差并不比MC小,但是它可以在新的数据加入时,逐渐得到更小的误差,它的泛化能力更强,也可以说TD能学到这批episode数据背后的规律。为什么呢?因为它引入了相邻变量之间的联系,说白了也就是引入了DP的bootstrap思想,而这个区别帮助TD找到了数据背后的规律。
这个例子很好的说明了MC和TD在算法机制上的不同。我们详细说一下:
- MC可以在固定的训练数据上得到误差最小的估计值。从统计学角度讲,MC的估计值是无偏估计,也就是如果有无限的样本,MC最终的估计结果一定是正确的;然而对于不断增加的样本数,每一个新加入的样本,与其他已有样本之间都是相互独立的,由于episode的长度不一定,MC算法每次都要等到episode序列结束,在等待过程中会引入大量的不确定性,最终的估计结果则自然带有很大的波动,也就是方差会很大。
- TD可以在不断增加的数据上更快地得到误差较小的估计值。仍然从统计学角度看,TD的估计值是有偏的,因为它使用了别的状态的value 估计来更新当前状态的value,如果别的状态的value不是真实值,那么自然会引入一些偏差;然而由于TD只需要一步之后的结果,因此引入的波动性很小。另外,根据上个例子的结论,可以看出TD可以学到当前数据相关的马尔可夫模型的最大似然估计:模型中状态间的转移概率,就是当前观测序列中的转移概率,模型中的期望reward,就是当前观测序列中reward的均值,并依据这个模型估计给出绝对正确的value。因为一旦模型是对的,那么value的估计值就一定是正确的。这个过程也叫做“确定性等价估计”,因为它等同于假定潜在模型是确定性的,而非近似的。
上述总结也能说明为什么TD要比蒙特卡洛快很多(batch updating下)。因为TD总是在更新成更匹配数据的模型,估计值也越来越准确;而MC的已有估计结果会收到下一个episode随机性的影响。这也能一定程度上解释为何之前NonBatch规则下TD也比蒙特卡洛快,因为虽然NonBatch规则下TD并不能获得“确定性等价估计”,但也可以认为是粗略朝这个方向在更新估计值。
从适用性来说,蒙特卡洛算法更适合非马尔可夫性质的任务,TD算法更适合具备马尔可夫性质的任务 。蒙特卡洛算法要求episode必须是离散的且必须有terminate state,TD则没这个要求。
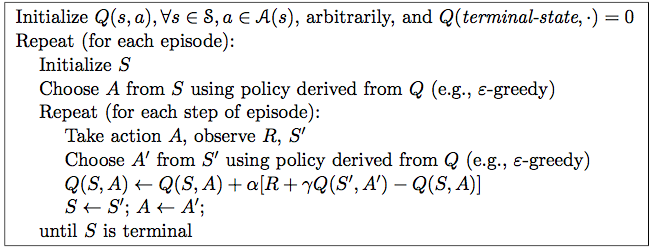
6.4 Sarsa: On-policy TD Control
这一节开始,我们用TD代替第五章的MC,仍然按照GPI模式,整合到整个policy iteration过程中。TD在这里扮演的角色和MC一样,是policy evaluation部分。同样的,TD算法也需要平衡exploration和exploitation,因此也分成on-policy和off-policy两类。这一节是讲on-policy,下一节讲off-policy。
第一步,就是用估算代替
。结合如下更新公式:
可知,如果我们要更新某个状态-动作对的Q,需要一个五元tuple
,这也是Sarsa名字的来历(哈哈 有意思)。
第二步,确保Sarsa可以收敛。同on-policy的蒙特卡洛算法一样,Sarsa的收敛条件也是当所有的state-action pair都被访问过无限次,因此需要采取Non-deterministic类型的或者
policies。
依然是给出伪代码:
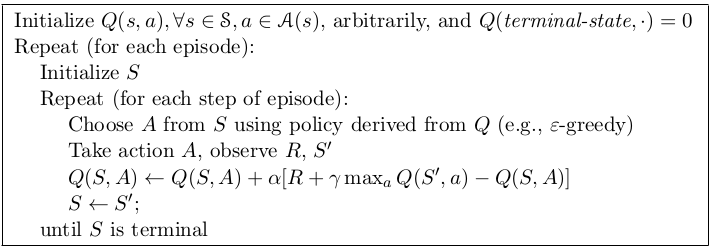
6.5 Q-learning: Off-policy TD control
Q-learning如果拿第五章的off-policy MC算法来对比,就更容易理解了。Q-learning最简单的形式是one-step Q-learning,定义如下:
注意和on-policy TD的区别:,这表明在更新当前
时,不再用当前已经发生的下一步
(由behavior policy生成),而是从target policy在
时结合所有可能的
得到的
集合中选出最大的那个Q。
Q-learning 伪代码如下:
6.6 Games, Afterstates, and Other Special Cases
这一节主要讨论一个叫做Afterstates的概念。
我们都知道state、state-action pair,那么afterstate和这两者的不同就是把这state和action合起来,构成一个afterstate集合。根据afterstate集合,又可以衍生出afterstate value function。
为什么要这么干呢?因为在很多棋类游戏比如tic-tac-toe中,(1)很多情况下,某个state经过某个action之后的状态是确定性的;(2)很多state经过不同的action之后,会得到同样的afterstate,而只维护一个afterstate就能够减少很多多余的state-action pair。
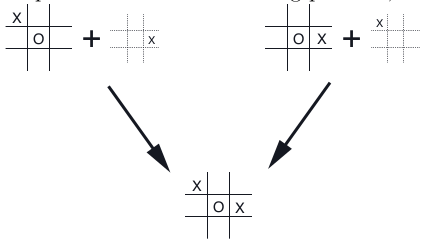
上图给出了tic-tac-toe游戏中一种典型的两种state-pair最后得到同一个afterstate的情况。
这种简化技巧可以减少agent的学习时间,还能应对某些不太容易使用state或者state-pair的任务。